También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- 2N3906 General Purpose Transistors: PNP SiliconDocumento7 páginas2N3906 General Purpose Transistors: PNP SiliconJose G. Cantillo L.Aún no hay calificaciones
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- 2N3906 General Purpose Transistors: PNP SiliconDocumento7 páginas2N3906 General Purpose Transistors: PNP SiliconJose G. Cantillo L.Aún no hay calificaciones
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Manufacturer: Model: Year: Registration: Mileage: Job Number: DateDocumento5 páginasManufacturer: Model: Year: Registration: Mileage: Job Number: DateVoicu StaneseAún no hay calificaciones
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- Modbus RtuDocumento8 páginasModbus RtuVoicu StaneseAún no hay calificaciones
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Analysis of Self Excited Induction GeneratorDocumento7 páginasAnalysis of Self Excited Induction Generatorsajs201100% (1)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Modbus RtuDocumento8 páginasModbus RtuVoicu StaneseAún no hay calificaciones
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- FastTrack To WirelessSpeedlightsDocumento8 páginasFastTrack To WirelessSpeedlightsVoicu StaneseAún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Css Cheat SheetDocumento1 páginaCss Cheat SheetIvica DumanovicAún no hay calificaciones
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Dell Studio-1558 Service Manual En-UsDocumento49 páginasDell Studio-1558 Service Manual En-UsVoicu StaneseAún no hay calificaciones
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Steinmetz, Charles Proteus - Electric Discharges Waves and ImpulsesDocumento172 páginasSteinmetz, Charles Proteus - Electric Discharges Waves and ImpulsesVoicu StaneseAún no hay calificaciones
- Fix engine codes and diagnosticsDocumento4 páginasFix engine codes and diagnosticsVitor Roberto MoreiraAún no hay calificaciones
- Release NoteDocumento8 páginasRelease NoteVoicu StaneseAún no hay calificaciones
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- M-Bus 012Documento36 páginasM-Bus 012Voicu StaneseAún no hay calificaciones
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Building Automation and Control L System Desi GoDocumento52 páginasBuilding Automation and Control L System Desi GoVoicu StaneseAún no hay calificaciones
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- MBus 03 eDocumento26 páginasMBus 03 eVoicu StaneseAún no hay calificaciones
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- MpBus 02 eDocumento30 páginasMpBus 02 eVoicu StaneseAún no hay calificaciones
- M-Bus 012Documento36 páginasM-Bus 012Voicu StaneseAún no hay calificaciones
- Info Iec60870 5 601 Ed1 0 enDocumento7 páginasInfo Iec60870 5 601 Ed1 0 enVoicu StaneseAún no hay calificaciones
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- MicroturbineSection 3Documento18 páginasMicroturbineSection 3Voicu StaneseAún no hay calificaciones
- M BusDocumento88 páginasM Busakshay_haridasAún no hay calificaciones
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Telit Wireless M-Bus User Guide r3Documento37 páginasTelit Wireless M-Bus User Guide r3Voicu StaneseAún no hay calificaciones
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- CSIR Microturbine Research for Distributed Power GenerationDocumento1 páginaCSIR Microturbine Research for Distributed Power GenerationVoicu StaneseAún no hay calificaciones
- Telit SR Manager Tool User Guide r1Documento72 páginasTelit SR Manager Tool User Guide r1Voicu StaneseAún no hay calificaciones
- The Definitive Guide to the M-Bus ProtocolDocumento91 páginasThe Definitive Guide to the M-Bus ProtocolZoran MilicAún no hay calificaciones
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Paper 10: DYNAMICS BEHAVIOR OF A 30 KW CAPSTONE MICROTURBINEDocumento18 páginasPaper 10: DYNAMICS BEHAVIOR OF A 30 KW CAPSTONE MICROTURBINEMAT JIBRUD100% (1)
- Kalorimetar Data Sheet UH50 - UH106 101kDocumento15 páginasKalorimetar Data Sheet UH50 - UH106 101kbobesponjakockaloneAún no hay calificaciones
- Williams Microturbine Diary Lagoon 03-3-018Documento8 páginasWilliams Microturbine Diary Lagoon 03-3-018Voicu StaneseAún no hay calificaciones
- A Microturbine For Electric Power Generation - Paper PresentationDocumento8 páginasA Microturbine For Electric Power Generation - Paper Presentationprateekg92Aún no hay calificaciones
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- MicroturbineSection 3Documento18 páginasMicroturbineSection 3Voicu StaneseAún no hay calificaciones
- Machine TimeDocumento11 páginasMachine TimeFRANCIS THOMASAún no hay calificaciones
- Solids Flow Feeder Equipment for Precise Measurement & ControlDocumento7 páginasSolids Flow Feeder Equipment for Precise Measurement & ControlAbhishek DuttaAún no hay calificaciones
- Tube Upsetting Machines BrochureDocumento10 páginasTube Upsetting Machines BrochuredemirilkAún no hay calificaciones
- MAIN Electrical Parts List: Parts Code Design LOC DescriptionDocumento22 páginasMAIN Electrical Parts List: Parts Code Design LOC DescriptionJerzy DziewiczkiewiczAún no hay calificaciones
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Ee-316 - Circuit Theory LabDocumento47 páginasEe-316 - Circuit Theory LabsureshhasiniAún no hay calificaciones
- JetFlash Online Recovery User Manual - ENDocumento10 páginasJetFlash Online Recovery User Manual - ENSubrata DattaAún no hay calificaciones
- Tablet ToolingDocumento51 páginasTablet ToolingDr. Muhammad Imran Khan100% (2)
- FL40AC-FL60AC EX Electrical Schematic 177666Documento1 páginaFL40AC-FL60AC EX Electrical Schematic 177666Omayr QureshiAún no hay calificaciones
- How To Use AZUpDocumento1 páginaHow To Use AZUpjovicasAún no hay calificaciones
- Text Programming Guide For iOSDocumento106 páginasText Programming Guide For iOSPetr MánekAún no hay calificaciones
- Rfid Based Attendance SystemDocumento16 páginasRfid Based Attendance Systemhim chauAún no hay calificaciones
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Tecumseh Service Repair Manual VH80 VH100 HH80 HH100 HH120 Oh120 Oh140 Oh160 Oh180 8HP Thru 18HP Cast Iron Engines 691462a PDFDocumento78 páginasTecumseh Service Repair Manual VH80 VH100 HH80 HH100 HH120 Oh120 Oh140 Oh160 Oh180 8HP Thru 18HP Cast Iron Engines 691462a PDFDan Clarke75% (4)
- On Tap Water Filter System InstructionsDocumento48 páginasOn Tap Water Filter System InstructionsFilipa FigueiredoAún no hay calificaciones
- Parts Catalog TT75, TT55 NEW HOLLANDDocumento360 páginasParts Catalog TT75, TT55 NEW HOLLANDrogerio97% (35)
- Exercise 4 - HERBICIDE CALCULATION - MSMP Version - Docx Version 1Documento4 páginasExercise 4 - HERBICIDE CALCULATION - MSMP Version - Docx Version 1Omaiwa Mo ShinderuAún no hay calificaciones
- Unix For Beginners - SLDocumento220 páginasUnix For Beginners - SLPavan VasanthamAún no hay calificaciones
- Nokia 7368 ISAM ONT G-010G-A For Optical LAN Data Sheet enDocumento3 páginasNokia 7368 ISAM ONT G-010G-A For Optical LAN Data Sheet enMirado AndriamihasinoroAún no hay calificaciones
- Fuzzy Set Theory: UNIT-2Documento45 páginasFuzzy Set Theory: UNIT-2Sharma SudhirAún no hay calificaciones
- Manual de Partes Gen Set DQFADDocumento272 páginasManual de Partes Gen Set DQFADJorge Calcaneo MartinezAún no hay calificaciones
- Safety Analysis of Mooring Hawser of FSO and SPM B PDFDocumento10 páginasSafety Analysis of Mooring Hawser of FSO and SPM B PDFORUGAAún no hay calificaciones
- Precast Concrete Septic Tank 5000dsDocumento1 páginaPrecast Concrete Septic Tank 5000dsMarco Vega TaipeAún no hay calificaciones
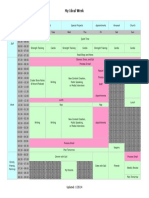
- My Ideal Week PDFDocumento1 páginaMy Ideal Week PDFAnonymous QE45TVC9e3Aún no hay calificaciones
- 4-way switch wiring diagram for a 2 pickup guitarDocumento1 página4-way switch wiring diagram for a 2 pickup guitarNebojša JoksimovićAún no hay calificaciones
- Champion 700 Series Motor Grader Series I Operators Manual Revision 1 8-24-1977 PDFDocumento54 páginasChampion 700 Series Motor Grader Series I Operators Manual Revision 1 8-24-1977 PDFjulianmata77% (13)
- Calculation Procedure, Low-Finned Tubes: Exxon EngineeringDocumento56 páginasCalculation Procedure, Low-Finned Tubes: Exxon Engineeringvin ssAún no hay calificaciones
- Top 145 Database Terms DictionaryDocumento13 páginasTop 145 Database Terms DictionaryUnais_Aún no hay calificaciones
- Online School Management System Integrated With Accounting Management SystemDocumento24 páginasOnline School Management System Integrated With Accounting Management SystemKIRUTHIKA SAún no hay calificaciones
- Media Planning BasicDocumento142 páginasMedia Planning BasicHanif Lakdawala100% (1)
- AcrSavoniacJ ZDocumento454 páginasAcrSavoniacJ ZЕвгенияAún no hay calificaciones
- Waterfall Model - The Original Software Development Process ModelDocumento3 páginasWaterfall Model - The Original Software Development Process ModelmushfiqAún no hay calificaciones
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationDe EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationAún no hay calificaciones
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)De EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Calificación: 4 de 5 estrellas4/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireDe EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireAún no hay calificaciones
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeDe EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeCalificación: 5 de 5 estrellas5/5 (1)
- CCNA Certification Study Guide, Volume 2: Exam 200-301De EverandCCNA Certification Study Guide, Volume 2: Exam 200-301Aún no hay calificaciones
- Amazon Web Services (AWS) Interview Questions and AnswersDe EverandAmazon Web Services (AWS) Interview Questions and AnswersCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityDe EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityCalificación: 4.5 de 5 estrellas4.5/5 (13)