También podría gustarte
- 2011 - Autonomous Rangefinder System Based On PSOC PDFDocumento67 páginas2011 - Autonomous Rangefinder System Based On PSOC PDFpablocotanAún no hay calificaciones
- Virtual Machine and Code Generator For PLC SystemsDocumento369 páginasVirtual Machine and Code Generator For PLC SystemspablocotanAún no hay calificaciones
- FCC Antenna Factors PDFDocumento6 páginasFCC Antenna Factors PDFpablocotan100% (1)
- 00 IntroductionDocumento4 páginas00 IntroductionpablocotanAún no hay calificaciones
- How To Make Eye Catching User InterfacesDocumento25 páginasHow To Make Eye Catching User InterfacespablocotanAún no hay calificaciones
- Good 5990-7036en - Radar, Ew & Elint TestingDocumento24 páginasGood 5990-7036en - Radar, Ew & Elint TestingpablocotanAún no hay calificaciones
- SASE2013 AllegroDocumento20 páginasSASE2013 AllegropablocotanAún no hay calificaciones
- Thesis Comapring CoDeSys V2 and CoDeSys V3Documento38 páginasThesis Comapring CoDeSys V2 and CoDeSys V3pablocotanAún no hay calificaciones
- UG1119 - Vivado Tutorial - Creating and Packaging Custom IP - Ver2015.2Documento57 páginasUG1119 - Vivado Tutorial - Creating and Packaging Custom IP - Ver2015.2pablocotanAún no hay calificaciones
- PFC PDFDocumento92 páginasPFC PDFpablocotanAún no hay calificaciones
- Introduction to LabVIEW and Computer-Based MeasurementsDocumento68 páginasIntroduction to LabVIEW and Computer-Based MeasurementsmgheryaniAún no hay calificaciones
- Ug Pna PDFDocumento110 páginasUg Pna PDFpablocotanAún no hay calificaciones
- Tips For Making Fast, Accurate Antenna MeasurementsDocumento7 páginasTips For Making Fast, Accurate Antenna MeasurementspablocotanAún no hay calificaciones
- Good 5989-7575en - Radar MeasurementsDocumento88 páginasGood 5989-7575en - Radar MeasurementspablocotanAún no hay calificaciones
- Last UploadedDocumento1 páginaLast UploadedpablocotanAún no hay calificaciones
- Neuromonitoring SyllabusDocumento9 páginasNeuromonitoring SyllabuspablocotanAún no hay calificaciones
- Avoiding Airway Catastrophes in Obstetrical PatientsDocumento20 páginasAvoiding Airway Catastrophes in Obstetrical PatientspablocotanAún no hay calificaciones
- Making Fast and Accurate Antenna MeasurementsDocumento8 páginasMaking Fast and Accurate Antenna MeasurementspablocotanAún no hay calificaciones
- Arti Cial and Medical Innovations Applied To AnesthesiologyDocumento2 páginasArti Cial and Medical Innovations Applied To AnesthesiologypablocotanAún no hay calificaciones
- PFC PDFDocumento92 páginasPFC PDFpablocotanAún no hay calificaciones
- Pic32mx1 - mx2 Starter KitDocumento2 páginasPic32mx1 - mx2 Starter KitpablocotanAún no hay calificaciones
- DM00039672 - AN3990 - Upgrading STM32F4DISCOVERY Board Firmware Using A USB KeyDocumento14 páginasDM00039672 - AN3990 - Upgrading STM32F4DISCOVERY Board Firmware Using A USB KeypablocotanAún no hay calificaciones
- Development and Tests of A WSNDocumento48 páginasDevelopment and Tests of A WSNpablocotanAún no hay calificaciones
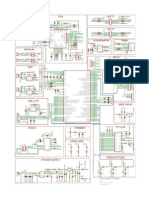
- PIC32 MAXI WEB Rev - A Schematic PDFDocumento1 páginaPIC32 MAXI WEB Rev - A Schematic PDFgeorgesmaccarioAún no hay calificaciones
- Brstm32 - STM32 Platform ProcessorsDocumento12 páginasBrstm32 - STM32 Platform ProcessorspablocotanAún no hay calificaciones
- 2008 - A Real-Time Person Detection Method For Moving CamerasDocumento8 páginas2008 - A Real-Time Person Detection Method For Moving CameraspablocotanAún no hay calificaciones
- DM00038796 - AN3983 - STM32F4DISCOVERY Peripheral Firmware ExamplesDocumento19 páginasDM00038796 - AN3983 - STM32F4DISCOVERY Peripheral Firmware ExamplespablocotanAún no hay calificaciones
- Software Utility For Control, Diagnostic and Communication With Inertial Measuring UnitDocumento73 páginasSoftware Utility For Control, Diagnostic and Communication With Inertial Measuring UnitpablocotanAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Denon-S32!52!52DAB Wireless Music SysDocumento102 páginasDenon-S32!52!52DAB Wireless Music SyscesarlcaAún no hay calificaciones
- Addendum Manual FTDocumento77 páginasAddendum Manual FTJUANITOPYTAún no hay calificaciones
- Microelectronic Circuits Chapter 3: Diodes Characteristics Models CircuitsDocumento65 páginasMicroelectronic Circuits Chapter 3: Diodes Characteristics Models CircuitsRAIHAN AZWAR IBRAHIM PULUNGANAún no hay calificaciones
- Draw #Item Description: With Ion. Cham. 5 Areas Normal VersionDocumento41 páginasDraw #Item Description: With Ion. Cham. 5 Areas Normal VersionlegasuAún no hay calificaciones
- DX DiagDocumento34 páginasDX DiagjAún no hay calificaciones
- Roland/BOSS Products AC Adaptor InformationDocumento4 páginasRoland/BOSS Products AC Adaptor InformationCristian Daniel ChelariuAún no hay calificaciones
- Introduction to Computers: An Essential GuideDocumento97 páginasIntroduction to Computers: An Essential Guideta_1091100% (1)
- TN 21Documento4 páginasTN 21polanco999Aún no hay calificaciones
- Pioneer Djm-V10 Rrv4704Documento127 páginasPioneer Djm-V10 Rrv4704boroda2410100% (3)
- Programmable Peripheral Interface and ApplicationsDocumento53 páginasProgrammable Peripheral Interface and ApplicationsRakeshkumarcegAún no hay calificaciones
- Frequency Response of Transistor AmplifiersDocumento13 páginasFrequency Response of Transistor AmplifiersDaisuke FrancisAún no hay calificaciones
- Plotting V-I Curve of Ge DiodeDocumento12 páginasPlotting V-I Curve of Ge DiodeIvy Loraine PuaAún no hay calificaciones
- LG Spec-Sheet Lv340c 011972 PRDocumento4 páginasLG Spec-Sheet Lv340c 011972 PRSanAún no hay calificaciones
- SRC1203Documento3 páginasSRC1203RikenzAún no hay calificaciones
- Illustrated Parts Catalogue BK117 C-1 Battery InstallationDocumento5 páginasIllustrated Parts Catalogue BK117 C-1 Battery Installationjmam1992Aún no hay calificaciones
- 308Mhz/315Mhz/418Mhz/433.92Mhz Low-Power, FSK Superheterodyne ReceiverDocumento19 páginas308Mhz/315Mhz/418Mhz/433.92Mhz Low-Power, FSK Superheterodyne ReceiverBlagoja GjakovskiAún no hay calificaciones
- CDN Incisive Simulation Acceleration DeploymentDocumento10 páginasCDN Incisive Simulation Acceleration DeploymentexfmlnAún no hay calificaciones
- Xprop User GuideDocumento28 páginasXprop User GuidepriyajeejoAún no hay calificaciones
- MTDR 070Documento5 páginasMTDR 070NazeerAún no hay calificaciones
- Examine the Operation of a Switching DiodeDocumento8 páginasExamine the Operation of a Switching DiodeTeam Matrix100% (1)
- Assignment ReportDocumento6 páginasAssignment ReportAnaAún no hay calificaciones
- PMU Lecture 6 - The Impedance Model and ZbusDocumento17 páginasPMU Lecture 6 - The Impedance Model and ZbusPoor AdamAún no hay calificaciones
- Series and Parallel CircuitDocumento30 páginasSeries and Parallel CircuitAmirul Syazwan100% (1)
- Behringer Mixer MX602ADocumento16 páginasBehringer Mixer MX602AÁlvaro Remacha Vecino100% (1)
- WPTDocumento10 páginasWPTsrivaas131985Aún no hay calificaciones
- Digital Signal Processing Short Question and AnswersDocumento32 páginasDigital Signal Processing Short Question and AnswersRachit Nema88% (8)
- Práctica 1 TiristoresDocumento15 páginasPráctica 1 TiristoresDorian JesusAún no hay calificaciones
- A221hqv PDFDocumento88 páginasA221hqv PDFЕвгений ТокаревAún no hay calificaciones
- Transmission Lines and WaveguidesDocumento109 páginasTransmission Lines and WaveguidesruikarsachinAún no hay calificaciones
- AD624Documento17 páginasAD624سعيد ابوسريعAún no hay calificaciones