También podría gustarte
- Open Transition and Closed Transition Star Delta Wye Delta Starters For Induction MotorsDocumento30 páginasOpen Transition and Closed Transition Star Delta Wye Delta Starters For Induction Motorsshahadat08Aún no hay calificaciones
- Theory of Operation - Autotransformer Starter PDFDocumento3 páginasTheory of Operation - Autotransformer Starter PDFDiago100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationDe EverandStudy of a reluctance magnetic gearbox for energy storage system applicationCalificación: 1 de 5 estrellas1/5 (1)
- Peter Vas - Sensor Less Vector and Direct Torque ControlDocumento376 páginasPeter Vas - Sensor Less Vector and Direct Torque Controlveranvv83% (6)
- Induction Motor ControlDocumento22 páginasInduction Motor ControlSenpai TashiAún no hay calificaciones
- Operation of PumpsDocumento25 páginasOperation of PumpsPrajval ChauhanAún no hay calificaciones
- AIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorDocumento8 páginasAIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorRD GamingAún no hay calificaciones
- Mcqs (Transformers) : Electrical Machine Final RevisionDocumento5 páginasMcqs (Transformers) : Electrical Machine Final Revisionmoooo yii trrhjAún no hay calificaciones
- Starting and Speed Control of 3 Phase Induction MotorDocumento38 páginasStarting and Speed Control of 3 Phase Induction MotorSree ShobhaAún no hay calificaciones
- STARTING-induction MotorsDocumento9 páginasSTARTING-induction MotorsSolomon NyekoAún no hay calificaciones
- Chapter-2: Dynamic Behavior of Electric DrivesDocumento43 páginasChapter-2: Dynamic Behavior of Electric DrivesMuket AgmasAún no hay calificaciones
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorDocumento13 páginasUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarAún no hay calificaciones
- DC Motor StarterDocumento25 páginasDC Motor StarterSrinivasan PrakashAún no hay calificaciones
- Starting Methods of Induction MotorsDocumento8 páginasStarting Methods of Induction MotorsChathuranga Nagasinghe100% (1)
- Motor StartersDocumento9 páginasMotor Startersanon_896479742Aún no hay calificaciones
- Types of Motor StarterDocumento10 páginasTypes of Motor StarterEngr. CasmirAún no hay calificaciones
- Question No 1: Speed Control of DC MotorDocumento10 páginasQuestion No 1: Speed Control of DC MotorProxima YusAún no hay calificaciones
- Starters For Electrical MotorsDocumento17 páginasStarters For Electrical Motorssiva prakashAún no hay calificaciones
- Spa 2Documento4 páginasSpa 2millionAún no hay calificaciones
- Types of Motor StarterDocumento8 páginasTypes of Motor StarterRane Siddesh100% (1)
- Unit 3: Control of Three Phase Induction MotorDocumento52 páginasUnit 3: Control of Three Phase Induction MotorSidra BegumAún no hay calificaciones
- Good Day!: Tanjuatco, Jahriel P. BseeDocumento32 páginasGood Day!: Tanjuatco, Jahriel P. BseeTanjuatco JahrielAún no hay calificaciones
- DC Motors Starters and Breaking MethodsDocumento25 páginasDC Motors Starters and Breaking MethodsRukkuArunAún no hay calificaciones
- Unit - I Synchronous GeneratorDocumento25 páginasUnit - I Synchronous GeneratorVenkatesan SwamyAún no hay calificaciones
- DC Motors Starters and Breaking MethodsDocumento25 páginasDC Motors Starters and Breaking Methodskrishnareddy_chintalaAún no hay calificaciones
- Ahmed Karam Abdo REPORT 1 PDFDocumento8 páginasAhmed Karam Abdo REPORT 1 PDFdragon for pc gamesAún no hay calificaciones
- Double Cage RotorsDocumento17 páginasDouble Cage RotorsweirdwolfvortexAún no hay calificaciones
- AC 3 Phase Induction MotorsDocumento10 páginasAC 3 Phase Induction MotorsTuhin HandaAún no hay calificaciones
- Soft StartDocumento5 páginasSoft Startnicko_octaveroAún no hay calificaciones
- Induction To AC Motors FAQDocumento24 páginasInduction To AC Motors FAQSrini VasanAún no hay calificaciones
- Eia Micro ProjectDocumento5 páginasEia Micro ProjectMeezan AhmedAún no hay calificaciones
- 3 MotorDocumento4 páginas3 MotorHuzaifah ShazaliAún no hay calificaciones
- Starting Methods of Single Phase Induction MotorsDocumento5 páginasStarting Methods of Single Phase Induction MotorsKen WalkerAún no hay calificaciones
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocumento13 páginas3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqInternational Journal of computational Engineering research (IJCER)Aún no hay calificaciones
- Deep Bar and Double Cage 010223Documento20 páginasDeep Bar and Double Cage 010223Debankan ChatterjeeAún no hay calificaciones
- Unit-Ii Operating Principles And Relay Construction: ωt cos I I K 2 1 I k FDocumento26 páginasUnit-Ii Operating Principles And Relay Construction: ωt cos I I K 2 1 I k FpdselvamAún no hay calificaciones
- ELE 2117 Lesson 11Documento42 páginasELE 2117 Lesson 11elioAún no hay calificaciones
- Industrial Power Systems Handbook PDFDocumento987 páginasIndustrial Power Systems Handbook PDFpadmajasivaAún no hay calificaciones
- Unit 3Documento20 páginasUnit 3shaik WajidAún no hay calificaciones
- What Is Negative Sequence Current and How Does It Affect Generator WorkDocumento12 páginasWhat Is Negative Sequence Current and How Does It Affect Generator Workwaleed mohiAún no hay calificaciones
- Electrical and Instrumentation Maintenance Team: Training On Motor Starters By:Fitsum GirmaDocumento216 páginasElectrical and Instrumentation Maintenance Team: Training On Motor Starters By:Fitsum GirmaMesafint kassieAún no hay calificaciones
- Ahmed Karam Abdo REPORT 22 PDFDocumento7 páginasAhmed Karam Abdo REPORT 22 PDFdragon for pc gamesAún no hay calificaciones
- Three Phase Induction Motor Interview Questions 2 1Documento24 páginasThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- Resistance Start Split Phase Induction MotorDocumento32 páginasResistance Start Split Phase Induction Motorrockingsandy100% (1)
- VivaDocumento8 páginasVivasaraneeeAún no hay calificaciones
- Motorola Application NotesDocumento10 páginasMotorola Application Notesvasudeva yasasAún no hay calificaciones
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Documento22 páginasGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraAún no hay calificaciones
- EE6504-Electrical Machines - II-306544629-Em II Unit 4Documento20 páginasEE6504-Electrical Machines - II-306544629-Em II Unit 4Rajeev ValunjkarAún no hay calificaciones
- EE6504-Electrical Machines - II-306544629-Em II Unit 4Documento20 páginasEE6504-Electrical Machines - II-306544629-Em II Unit 4Rajeev ValunjkarAún no hay calificaciones
- Unit Iv Starting and Speed Control of Three Phase Induction MotorDocumento19 páginasUnit Iv Starting and Speed Control of Three Phase Induction MotorVamshiAún no hay calificaciones
- COMMUTATION IN A DC MOTOR Is The Process of Reversing Armature Current at The Moment When Unlike Poles of The ArmatureDocumento3 páginasCOMMUTATION IN A DC MOTOR Is The Process of Reversing Armature Current at The Moment When Unlike Poles of The ArmatureMichael MontinolaAún no hay calificaciones
- Motor Control and ProtectionDocumento64 páginasMotor Control and ProtectionRaghuram PatriAún no hay calificaciones
- AC Motors Starting and Protection SystemsDocumento32 páginasAC Motors Starting and Protection SystemsTarek MohamedAún no hay calificaciones
- Reduced Voltage Starting Using Part Winding Technique of 3-Phase Cage Rotor Induction MotorDocumento8 páginasReduced Voltage Starting Using Part Winding Technique of 3-Phase Cage Rotor Induction MotorKennethAún no hay calificaciones
- Lab 07 - DC MotorsDocumento9 páginasLab 07 - DC MotorsChamila SumathiratnaAún no hay calificaciones
- Starting Methods of Three Phase Induction Motors: Direct-On-Line (DOL) StartersDocumento4 páginasStarting Methods of Three Phase Induction Motors: Direct-On-Line (DOL) Startersrajat nimjeAún no hay calificaciones
- SChapter13 The Adams MotorGeneratorDocumento14 páginasSChapter13 The Adams MotorGeneratorpranalar100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Aún no hay calificaciones
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Calificación: 2.5 de 5 estrellas2.5/5 (3)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDe EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAún no hay calificaciones
- E-5-2 Marked Up Single Line Diagram HDDI-1 Revised 200722Documento31 páginasE-5-2 Marked Up Single Line Diagram HDDI-1 Revised 200722Basileus CastaliensisAún no hay calificaciones
- Bcs-Exp2 4Documento1 páginaBcs-Exp2 4johndavidcegAún no hay calificaciones
- Calculate The Size of Battery Bank & Invertor: Electrical Load DetailsDocumento3 páginasCalculate The Size of Battery Bank & Invertor: Electrical Load DetailsARAÇ YEREL EYLEM GRUBU DERNEĞİAún no hay calificaciones
- Poly FuseDocumento3 páginasPoly FuseJamesdomingoAún no hay calificaciones
- Digital CMOS IC DesignDocumento44 páginasDigital CMOS IC DesignAnkur PatelAún no hay calificaciones
- Low Power Low Dropout Middle Current Voltage Regulators: General Description FeaturesDocumento10 páginasLow Power Low Dropout Middle Current Voltage Regulators: General Description Features171 171Aún no hay calificaciones
- Report TextDocumento5 páginasReport TextVica Azka Novalya IIAún no hay calificaciones
- Power Supply, Ground & Circuit Elements: SectionDocumento178 páginasPower Supply, Ground & Circuit Elements: SectionVan GAPAún no hay calificaciones
- EDCM2Documento19 páginasEDCM2yanith kumarAún no hay calificaciones
- Switchboard Construction Siemتنens BasicsDocumento5 páginasSwitchboard Construction Siemتنens BasicsBassem MostafaAún no hay calificaciones
- 120288-PSU-EP-SPE-005000 A08 (25kV PC Spec) Signed Tony Storey P&C PhilosophyDocumento50 páginas120288-PSU-EP-SPE-005000 A08 (25kV PC Spec) Signed Tony Storey P&C PhilosophyAmjidAún no hay calificaciones
- PCB Layout TipsDocumento34 páginasPCB Layout TipsMallappa Patil100% (2)
- Moc 3031Documento6 páginasMoc 3031Francisco FloresAún no hay calificaciones
- Penn Commercial Refrigeration: Transducers and SensorsDocumento3 páginasPenn Commercial Refrigeration: Transducers and SensorsRonAún no hay calificaciones
- User's Manual For VC99+ 3 6/7 DMM 1.summary This AIDETEK VC99+ Multimeter Is A SteadyDocumento5 páginasUser's Manual For VC99+ 3 6/7 DMM 1.summary This AIDETEK VC99+ Multimeter Is A SteadyNick NormanAún no hay calificaciones
- MCR265Documento3 páginasMCR265Luis Enrique De los Santos FarfánAún no hay calificaciones
- MT50 Part ListDocumento4 páginasMT50 Part ListfoxmancementAún no hay calificaciones
- Open Circuit Saturation Curve of An Alternator-EXPT8Documento2 páginasOpen Circuit Saturation Curve of An Alternator-EXPT8Karl Joseph Chua Villariña100% (3)
- Spare Parts Catalog: ADVAC Model 04Documento11 páginasSpare Parts Catalog: ADVAC Model 04amk2009Aún no hay calificaciones
- NTE2393 Mosfet N-Channel Enhancement Mode, High Speed SwitchDocumento3 páginasNTE2393 Mosfet N-Channel Enhancement Mode, High Speed SwitchAbel RodriguezAún no hay calificaciones
- Dee 3043-Electronic Circuit: PTSS - JKE - DEE3043 - LAB1Documento8 páginasDee 3043-Electronic Circuit: PTSS - JKE - DEE3043 - LAB1nixsone357Aún no hay calificaciones
- LV Electrical Installation GuideDocumento16 páginasLV Electrical Installation GuideAhmed S ZainyAún no hay calificaciones
- IndoasianDocumento36 páginasIndoasianumamaheshAún no hay calificaciones
- RG59 SG DatasheetDocumento2 páginasRG59 SG DatasheetMykel VelasquezAún no hay calificaciones
- Module 8Documento21 páginasModule 8Joshua GuiriñaAún no hay calificaciones
- Contoh ETAP 2Documento6 páginasContoh ETAP 2Ken Rama AdityoAún no hay calificaciones
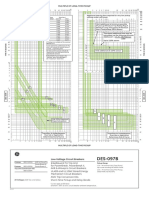
- Des-097b - Short TimeDocumento1 páginaDes-097b - Short Timeshrikanth5singhAún no hay calificaciones
- Design of Electrical System Based On Load Flow Analysis Using ETAP For IEC ProjectsDocumento6 páginasDesign of Electrical System Based On Load Flow Analysis Using ETAP For IEC ProjectsAlejandro Palacios100% (1)