También podría gustarte
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Power System Harmonics OutlineDocumento44 páginasPower System Harmonics OutlineArnel Pascual Laquindanum0% (1)
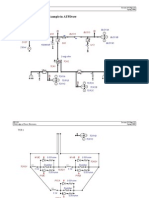
- 12 Pulse ExampleDocumento5 páginas12 Pulse ExamplekamuikAún no hay calificaciones
- Transmidor de Presión DiferencialDocumento16 páginasTransmidor de Presión DiferencialkamuikAún no hay calificaciones
- 15 Busbar ProtectionDocumento21 páginas15 Busbar ProtectionSristick100% (8)
- CIGRE-106 The Changing Utility Workforce and The Emergence of Building Information Modeling in Utilities PDFDocumento4 páginasCIGRE-106 The Changing Utility Workforce and The Emergence of Building Information Modeling in Utilities PDFEleazar Sierra EspinozaAún no hay calificaciones
- Power Line Parameters ExplainedDocumento11 páginasPower Line Parameters ExplainedkamuikAún no hay calificaciones
- Power System Harmonics OutlineDocumento44 páginasPower System Harmonics OutlineArnel Pascual Laquindanum0% (1)
- 1 Tutorial Final Com Logo ChileDocumento149 páginas1 Tutorial Final Com Logo ChilekamuikAún no hay calificaciones
- AGCH-5!69!138 KV Horizontal MountDocumento1 páginaAGCH-5!69!138 KV Horizontal MountkamuikAún no hay calificaciones
- Eritech Handbook LP Iec 62305 Lt30373Documento92 páginasEritech Handbook LP Iec 62305 Lt30373ranjithkpvcAún no hay calificaciones
- IEEE - C29.2 - 1992 Insulators (Porcelain and Glass) Suspension TypeDocumento25 páginasIEEE - C29.2 - 1992 Insulators (Porcelain and Glass) Suspension TypekamuikAún no hay calificaciones
- CIGRE-101 Probabilistic Transmission Planning Method at BCTC and A Case StudyDocumento9 páginasCIGRE-101 Probabilistic Transmission Planning Method at BCTC and A Case StudykamuikAún no hay calificaciones
- Protection FundamentalsDocumento12 páginasProtection FundamentalsGeorge AsuncionAún no hay calificaciones
- IEEE - C92.1 - 1982 Insulation Coordination For Power SystemsDocumento16 páginasIEEE - C92.1 - 1982 Insulation Coordination For Power Systemskamuik100% (2)
- Calculo Protecciones Motor ElectricoDocumento15 páginasCalculo Protecciones Motor ElectricokamuikAún no hay calificaciones
- Guia Tecnica Abb N°6Documento36 páginasGuia Tecnica Abb N°6kamuikAún no hay calificaciones
- CIGRE-153 Accelerating Experience - Utility Sector Case Studies in Training and Knowledge ManagementDocumento11 páginasCIGRE-153 Accelerating Experience - Utility Sector Case Studies in Training and Knowledge ManagementkamuikAún no hay calificaciones
- CIGRE-135 Fluid Structure Interaction Methods in Prevention of Transformer ExplosionDocumento8 páginasCIGRE-135 Fluid Structure Interaction Methods in Prevention of Transformer ExplosionkamuikAún no hay calificaciones
- CIGRE-140 Wind Farm Fuzzy Modeling For Adequacy Evaluation of Power SystemDocumento8 páginasCIGRE-140 Wind Farm Fuzzy Modeling For Adequacy Evaluation of Power SystemkamuikAún no hay calificaciones
- CIGRE-126 Applying Meteorological Data To Power System Planning, Operation, and MaintenanceDocumento9 páginasCIGRE-126 Applying Meteorological Data To Power System Planning, Operation, and MaintenancekamuikAún no hay calificaciones
- Active Filtering Control Schemes: Imitation Measured CurrentsDocumento16 páginasActive Filtering Control Schemes: Imitation Measured CurrentskamuikAún no hay calificaciones
- CIGRE-137 Improving IEC 51850 Interoperability - Experiences and RecommendationsDocumento10 páginasCIGRE-137 Improving IEC 51850 Interoperability - Experiences and RecommendationskamuikAún no hay calificaciones
- CIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformDocumento9 páginasCIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformkamuikAún no hay calificaciones
- CIGRE-119 Rejuvenation of Insuslation in Aged Power CablesDocumento11 páginasCIGRE-119 Rejuvenation of Insuslation in Aged Power CableskamuikAún no hay calificaciones
- CIGRE-115 Switchgear Condition MonitoringDocumento8 páginasCIGRE-115 Switchgear Condition Monitoringkamuik100% (1)
- CIGRE-156 Smart Grids - A Network Perspective On Renewable Integration and Self-Healing NetworksDocumento7 páginasCIGRE-156 Smart Grids - A Network Perspective On Renewable Integration and Self-Healing NetworkskamuikAún no hay calificaciones
- CIGRE-146 Smart Grid 3.0 - A Grid Ready ApproachDocumento7 páginasCIGRE-146 Smart Grid 3.0 - A Grid Ready ApproachkamuikAún no hay calificaciones
- CIGRE-114 Online Tracking of Voltage Dependent Load Model ParametersDocumento8 páginasCIGRE-114 Online Tracking of Voltage Dependent Load Model ParameterskamuikAún no hay calificaciones
- CIGRE-136 Low Cost Feeder Monitoring Solution in Support of Utility OperationsDocumento6 páginasCIGRE-136 Low Cost Feeder Monitoring Solution in Support of Utility OperationskamuikAún no hay calificaciones
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- DC Motor Controlled RectifierDocumento5 páginasDC Motor Controlled RectifierDaksh SharmaAún no hay calificaciones
- 400925-M3-MW 400933-M3-MW 400772-M3-MW Polycarbonate Emergency & Sensor PDFDocumento3 páginas400925-M3-MW 400933-M3-MW 400772-M3-MW Polycarbonate Emergency & Sensor PDFAnonymous TmWHOO7QrhAún no hay calificaciones
- Attom - DC Power System-Brochure-en-2021v1.2Documento5 páginasAttom - DC Power System-Brochure-en-2021v1.2Eleken Login2Aún no hay calificaciones
- Apgenco - Se - Mechanical EngineeringDocumento23 páginasApgenco - Se - Mechanical EngineeringNEELAKANTHESWARAún no hay calificaciones
- Cost Effective Tools For Finding The Fault Faster and Reducing Outage DurationDocumento2 páginasCost Effective Tools For Finding The Fault Faster and Reducing Outage DurationNguyen Anh TuAún no hay calificaciones
- Study of The Turbojet Engines As Propulsion SystemDocumento13 páginasStudy of The Turbojet Engines As Propulsion SystemRajath ShettyAún no hay calificaciones
- GEA34072 GE PC Solutions & Products Brochure A5 Low Res (032019) PDFDocumento91 páginasGEA34072 GE PC Solutions & Products Brochure A5 Low Res (032019) PDFRamesh YadlaAún no hay calificaciones
- Potential Need For Electric Vehicles, Charging Station Infrastructure and Its Challenges For The Indian MarketDocumento6 páginasPotential Need For Electric Vehicles, Charging Station Infrastructure and Its Challenges For The Indian MarketrajeeecvrAún no hay calificaciones
- ADA KS3 Physics Energy GuideDocumento23 páginasADA KS3 Physics Energy GuideRamesh100% (1)
- Simpson 280 DatasheetDocumento3 páginasSimpson 280 DatasheetDave MayAún no hay calificaciones
- Energy Information Handbook - New ZealandDocumento140 páginasEnergy Information Handbook - New ZealandCody WhitelawAún no hay calificaciones
- Busbar ProtectionDocumento8 páginasBusbar ProtectionMichael AshrafAún no hay calificaciones
- ES360 EnglishDocumento2 páginasES360 Englishnatee8632Aún no hay calificaciones
- Introduction To Geothermal Power Generati 2016 Geothermal Power GeneratiDocumento3 páginasIntroduction To Geothermal Power Generati 2016 Geothermal Power GeneratiJenni GuillenAún no hay calificaciones
- Living From The HeartDocumento54 páginasLiving From The HeartSabelo Mnukwa100% (1)
- Biofuels Act of 2006 (RA 9367)Documento15 páginasBiofuels Act of 2006 (RA 9367)Nylinad Etnerfacir ObmilAún no hay calificaciones
- TECHNIP Tpr-Parallel-Reformer 210x270 Final Web PDFDocumento8 páginasTECHNIP Tpr-Parallel-Reformer 210x270 Final Web PDFlaquetengoAún no hay calificaciones
- 1SXP110002C0201 - Electronic Products and Relay Selection Tables - July 2015Documento25 páginas1SXP110002C0201 - Electronic Products and Relay Selection Tables - July 2015Abdullrahim AlastalAún no hay calificaciones
- Conclusion Solar CellDocumento1 páginaConclusion Solar CellTiffany Price0% (1)
- Altivar AFE (Active Front End) - VW3A7252Documento3 páginasAltivar AFE (Active Front End) - VW3A7252Huy Ngô PhùngAún no hay calificaciones
- Playbook Document Template PDFDocumento583 páginasPlaybook Document Template PDFHimanshu ChaturvediAún no hay calificaciones
- Nibe F2040-12 VVM S320 - 1Documento5 páginasNibe F2040-12 VVM S320 - 1sciucAún no hay calificaciones
- Renner RSF OverviewDocumento8 páginasRenner RSF OverviewVlad LiviuAún no hay calificaciones
- EcoLogic :: Lesson Plan: Design For Ecological SustainabilityDocumento2 páginasEcoLogic :: Lesson Plan: Design For Ecological SustainabilityPowerhouse MuseumAún no hay calificaciones
- Bana Barn PDFDocumento4 páginasBana Barn PDFRajesh SinghAún no hay calificaciones
- Coek - Info - Performance Testing of Supercapacitors Important IDocumento14 páginasCoek - Info - Performance Testing of Supercapacitors Important ICazimir BostanAún no hay calificaciones
- Department of Electrical Engineering, PCE, Nagpur: Thanks For Filling OutDocumento5 páginasDepartment of Electrical Engineering, PCE, Nagpur: Thanks For Filling OutJAYANT BORDEAún no hay calificaciones
- Design and Analysis of Wheel Rim With Spiral FlexuresDocumento1 páginaDesign and Analysis of Wheel Rim With Spiral FlexuresantonytechnoAún no hay calificaciones
- 31DC130 PowerSheet D12130 0213Documento2 páginas31DC130 PowerSheet D12130 0213Mickael GrandjeanAún no hay calificaciones
- Embedded Power Critical ContinuityDocumento1 páginaEmbedded Power Critical ContinuityrepropAún no hay calificaciones