IOSR Journal of Engineering (IOSRJEN)
ISSN: 2250-3021 Volume 2, Issue 8 (August 2012), PP 23-28
www.iosrjen.org
www.iosrjen.org 23 | P a g e
A New Control Technique for Damping Low Frequency
Oscillations
Sangu Ravindra
1
, Dr.V.C.Veera Reddy
2
, Dr.S.Sivanagaraju
3
1
Associate Professor, Department of EEE, QISCET, Ongole,
2
Professor, Department of EEE, S.V.University, Tirupathi,
3
Associate Professor, Department of EEE, JNTUK, Kakinada.
ABSTRACT : - Low Frequency Oscillations (LFO) are a frequent adverse phenomenon which increase the
risk of instability for the power system and thus reduce the total and availability transfer capability (TTC and
ATC).LFO occur in power systems because of lack of the damping torque in order to dominance to power
system disturbances as change in mechanical input power. In the recent past Power System Stabilizer (PSS) was
used to damp LFO. FACTs devices, such as Unified Power Flow Controller (UPFC), can control power flow
and increase transient stability. So UPFC may be used to damp LFO instead of PSS. UPFC damps LFO
through direct control of voltage and power. In this research the linearized model of synchronous machine
(Heffron-Philips) connected to infinite bus (Single Machine-Infinite Bus: SMIB) with UPFC is used and also in
order to damp LFO, adaptive ANN damping controller for UPFC is designed and simulated. Simulation is
performed for various types of loads and for different disturbances. Simulation results demonstrate that the
developed ANN damping controller would be more effective in damping electromechanical oscillations in
comparison with the conventional lead-lag controller.
Keywords: - Low Frequency Oscillations (LFO), Unified Power Flow Controller (UPFC), Single Machine-
Infinite Bus (SMIB) power system, Artificial Neural Network (ANN) damping controller.
I. INTRODUCTION
The Benefits of Flexible AC Transmission Systems (FACTs) usages to improve power systems
stability are well known [1], [2]. The growth of the demand for electrical energy leads to loading the
transmission system near their limits. Thus, the occurrence of the LFO has increased. FACTs controllers has
capability to control network conditions quickly and this feature of FACTs can be used to improve power
system stability. The UPFC is a FACTS device that can be used to the LFO. The primarily use of UPFC is to
control the power flow in power systems. The UPFC consists of two voltage source converters (VSC) each of
them has two control parameters namely me, e, mb and b [3]. The UPFC used for power flow control,
enhancement of transient stability, mitigation of system oscillations and voltage regulation [3]. A
comprehensive and systematic approach for mathematical modeling of UPFC for steady-state and small signal
(linearized) dynamic studies has been proposed in [4-7]. The other modified linearized Heffron-Philips model of
a power system installed with UPFC is presented in [8] and [9]. For systems which are without power system
stabilizer (PSS), excellent damping can be achieved via proper controller design for UPFC parameters. By
designing a suitable UPFC controller, an effective damping can be achieved. It is usual that Heffron-Philips
model is used in power system to study small signal stability. This model has been used for many years
providing reliable results [10].
In this study, Applying artificial neural networks has many advantages such as the ability of adapting
to changes, fault tolerance capability, recovery capability, High-speed processing because of parallel processing
and ability to build a DSP chip with VLSI Technology. Matlab toolbox is used as a computing tool to
implement the ANN. To show performance of the designed adaptive artificial neural network controller, a
conventional lead-lag controller that is designed in [11] is used and the simulation results for the power system
including these two controllers are compared with each other.
II. POWER SYSTEM MODELING WITH UPFC
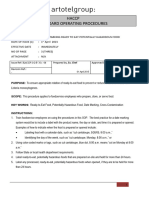
UPFC is one of the famous FACTs devices that is used to improve power system stability. Fig.1 shows
a single machine-infinite-bus (SMIB) system (Heffron-Philips model of a power system installed with UPFC)
with UPFC. It is assumed that the UPFC performance is based on pulse width modulation (PWM) converters. In
figure 1 me, mb and e, b are the amplitude modulation ratio and phase angle of the reference voltage of each
voltage source converter respectively. These values are the input control signals of the UPFC.
A New Control Technique For Damping Low Frequency Oscillations
www.iosrjen.org 24 | P a g e
Fig 1: Heffron-Philips model of a power system installed with UPFC
As it mentioned previously, a linearized model of the power system is used in dynamic studies of
power system. In order to consider the effect of UPFC in damping of LFO, the dynamic model of the UPFC is
employed; In this model the resistance and transient of the transformers of the UPFC can be ignored.
The systems dynamic relations are expressed as follows:
e e o A =
o
M D P P
e m
/ ) ( e e =
do fd q
T E E q E ' + = ' / ) (
) (
1
t to
A
A
fd
A
fd
v v
T
K
E
T
E + = (1)
There exit several models for UPFC depending on several study cases.
The following equation describe the dynamic behavior of UPFC :
(
(
(
+
(
=
(
2
sin
2
cos
0
0
E dc E
E dc E
Eq
Ed
E
E
Etq
Etd
v m
v m
i
i
x
x
v
v
o
o
(2)
(
(
(
+
(
=
(
2
sin
2
cos
0
0
B dc B
B dc B
Bq
Bd
B
B
Btq
Btd
v m
v m
i
i
x
x
v
v
o
o
(3)
| | | |
(
+
(
=
Bq
Bd
B B
dc
B
Eq
Ed
E E
dc
E
dc
i
i
C
m
i
i
C
m
dt
dv
o o o o sin cos
4
3
sin cos
4
3
(4)
By combining the above linear dynamic equations ,The state equations expressed as follows:
= AX + BU (5)
Where the matrixces
(6)
(
(
(
(
(
(
A
A
A
A
A
=
dc
fd
Q
v
E
E X
'
e
o
A New Control Technique For Damping Low Frequency Oscillations
www.iosrjen.org 25 | P a g e
(
(
(
(
A
A
A
A
=
B
B
E
E
m
m
U
o
o
(7)
Where m
E
,
E,
m
B
and,
B
are the variations of UPFC control parameters considered as the
inputs of state space model
(
(
(
(
(
(
(
(
(
=
9 8 7
6 5
'
0
'
0
'
0
3
'
0
4
2 1
0 0
1
0
1
0
0
0 0 0 0
k k k
T
k k
T T
k k
T
k k
T
k
T T
k
T
k
M
k
M
k
M
D
M
k
A
A
vd A
A A
A
A
A
d
qd
d d d
pd
o
e
(8)
(
(
(
(
(
(
(
(
(
=
b c cb e c ce
A
b v A
A
vb A
A
e v A
A
ve A
d
b q
d
qb
d
e q
d
qe
b p pb e p pe
k k k k
T
k k
T
k k
T
k k
T
k k
T
k
T
k
T
k
T
k
M
k
M
k
M
k
M
k
B
o o
o o
o o
o o
'
0
'
0
'
0
'
0
0 0 0 0
(9)
The k coefficients are obtained during the Linearization of (1) and (2) around the operating point[6].
III. DESIGN OF DAMPING CONTROLLERS
3.1. Lead-Lag Controller Design
As mentioned before, in this study two different controllers have been used to damp LFO. The first one
is conventional lead-lag controller. It consists of gain block, washout block, lead-lag compensator block. The
washout block is considered as a high-pass filter, with the time constant TW. Without this block steady changes
in input would modify the output. The value of TW is not critical and may be in the range of 1 to 20 seconds. In
this study, the parameters obtained from lead-lag controller design that is presented in [11], were used.
3.2. Adaptive Artificial neural networks Controller Design
Before the ANN can be used to adapt the controller gains in real time, it is necessary to determine a
proper set of values for the connection weights .The process of reaching the connection weights is normally
carried out off-line and is usually referred to as the training process. In the training process, we first compile a
set of training patterns and store these training patterns in the training set. Each training pattern comprises a set
of input data and the corresponding output data. A training pattern set of training patterns, which cover a wide
range of operating conditions, is finally used to train the desired ANN [16]. It should be noted that we use two
hidden layers. Main purpose of ANN is used for the reducing the error in the system, for that we are going to
use training data method. In this method, we have to give both input values and desired output value for
estimating the weight values, in that initial value taken as a random value. The input are and , desired
output is the function of f {
b
,
e
, m
b
, m
e
}.For each input having 20 membership functions and Two
rule base is considered.
ANN architecture for a two input sugeno model with two rules is shown in figure2.in which we are
using the XOR gate.
A New Control Technique For Damping Low Frequency Oscillations
www.iosrjen.org 26 | P a g e
Fig 2: ANN Architecture for a two input sugeno model with two rules
For the training data the error reducing method is the following steps are taken those are
1. Set the Learning Rate Parameter () is greater than the one and error value E=0.
2. First Layer k =1.
3. Calculate the output value f
i
(n) = tansig (<W
i
(( )+() )>)+ r ;for i=1,2,20.
4. Calculate error E=E+1/2||f - f
i
(n)||
2
.
5. Weights are updated W
i+1
= W
i
+ (f-tansig(<W
i
(( )+())>) + r); for i=1,2..20.
6. Check error E is not zero, then take the layer value as k =k+1,
7. Repeat the above process until when the error E as zero.
From above process we get the desired output function, the output function
f =(1-e-(W
i
(( )+())+r) /(1+e-(W
i
(( )+())+r) . The range of output function is -1 to +1.
IV. SIMULATION RESULTS
In this research, two different cases are studied. In the first case mechanical power and in the second
case reference voltage has step change and deviation in () and deviation in rotor angle () is observed.
The parameter values of system are gathered in Appendix. In first case, step change in mechanical input power
is studied. Simulations are performed when mechanical input power has 10% increase (Pm=0.1 pu) at t = 1s.
Simulation results for different types of loads and controllers (m
E,
E,
m
B
,
B
) and step change in
mechanical input power are shown in figures 3 to 7.
Fig 3: Angular velocity deviation during step change in mechanical input power for nominal load
(m
e
Controller).
Fig 4: Angular velocity deviation during step change in mechanical input power for light load (m
e
Controller).
A New Control Technique For Damping Low Frequency Oscillations
www.iosrjen.org 27 | P a g e
Fig 5: Angular velocity deviation during step change in mechanical input power for nominal load (e Controller)
Fig 6: Angular velocity deviation during step change in mechanical input power for nominal load
(m
b
Controller)
Fig.7 Angular velocity deviation during step change in mechanical input power for nominal load (b Controller)
As it can be seen from figures 3 to 7, lead-lag controller response is not as good as ANN damping
controller response and also ANN damping controller decreases settling time. In addition maximum overshoot
has decreased in comparison with lead-lag controller response.
In second case, simulations were performed when reference voltage has 5% increase (Vref =0.05 pu)
at t=1s. Figure 8 demonstrates simulation result for step change in reference voltage, under nominal load and for
b Controller.
Fig. 8 Response of angular velocity for 5% step change in reference voltage in the case of nominal load
(b Controller)
A New Control Technique For Damping Low Frequency Oscillations
www.iosrjen.org 28 | P a g e
Consequently simulation results show that ANN damping controller successfully increases damping
rate and decreases the amplitude of low frequency oscillations. Results comparison between conventional lead-
lag compensator and the proposed ANN damping controller for the UPFC indicates that the proposed ANN
damping controller has less settling time and less overshoot in comparison with the conventional lead lag
compensator.
V. CONCLUSION
With regard to UPFC capability in transient stability improvement and damping LFO of power
systems, an adaptive ANN damping controller for UPFC was presented in this paper. The controller was
designed for a single machine infinite bus system. Then simulation results for the system including ANN
damping controller were compared with simulation results for the system including conventional lead-lag
controller. Simulations were performed for different kinds of loads. Comparison showed that the proposed
adaptive ANN damping controller has good ability to reduce settling time and reduce amplitude of LFO.
APPENDIX
Generator: M = 2H = 8.0MJ / MVA, D=0.0, T
do
= 5.044s, X
d
= 1.0 pu, X
q
= 0.6pu , X
d
= 0.3pu
Exciter (IEEE Type ST1): K
A
=100, T
A
=0.01s
Reactances: X
lE
= 0.1pu, X
E
= X
B
= 0.1pu X
Bv
= 0.3pu, X
e
= 0.5pu
Operation Condition: P
e
= 0.8pu, V
t
= 1pu, V
b
= 1pu
UPFC parameters: m
E
= 0.4013, m
B
= 0.0789,
E
= - 85.3478
0
B
= - 78.2174
0
DC link: V
dc
= 2pu, C
dc
=1pu
REFERENCES
[1] N. G. Hingorani and L. Gyugyi, Understanding FACTS: Concepts and Technology of Flexible AC Transmission System, IEEE
Press, 2000.
[2] H.F.Wang, F.J.Swift," A Unified Model for the Analysis of FACTS Devices in Damping Power System
Oscillations Part I: Single-machine Infinite-bus Power Systems", IEEE Transactions on Power Delivery, Vol. 12, No. 2, April 1997,
pp.941-946.
[3] L. Gyugyi, C.D. Schauder, S.L. Williams, T.R.Rietman, D.R. Torgerson, A. Edris, "The Unified Power Flow Controller: A New
Approach to Power Transmission Control", IEEE Trans., 1995, pp. 1085-1097.
[4] Wolanki, F. D. Galiana, D. McGillis and G. Joos, Mid-Point Sitting of FACTS Devices in Transmission Lines, IEEE Transactions
on Power Delivery, vol. 12, No. 4, 1997, pp. 1717-1722.
[5] M. Noroozian, L. Angquist, M. Ghandari, and G. Anderson, Use of UPFC for optimal power flow control, IEEE Trans. on Power
Systems, vol. 12, no. 4, 1997, pp. 16291634.
[6] A Nabavi-Niaki and M R Iravani. Steady-state and Dynamic Models of Unified Power Flow Controller (UPFC) for Power System
Studies. IEEE Transactions on Power Systems, vol 11, 1996, p 1937.
[7] K S Smith, L Ran, J Penman. Dynamic Modelling of a Unified Power Flow Controller. IEE Proceedings-C, vol 144, 1997, pp.7.
[8] H F Wang. Damping Function of Unified Power Flow Controller. IEE Proceedings-C, vol 146, no 1, January 1999, p 81.
[9] H. F. Wang, F. J. Swift, A Unified Model for the Analysis of FACTS Devices in Damping Power System Oscillations Part I:
Single-machine Infinite-bus Power Systems, IEEE Transactions on Power Delivery, Vol.12, No. 2, April, 1997, pp. 941-946.
[10] P. Kundur,"Power System Stability and Control, McGraw-Hill.
[11] N. Tambey, M.L. Kothari, Damping of power system oscillations with unified power flow controller (UPFC),IEE Proc. -Gener.
Transm.Distrib.,Vol. 150, No. 2, March 2009.
[12] Jang-Cheol Seo Seung-Il Moon Jong-Keun Park Jong-Woong Choe, "Design of a robust UPFC controller for enhancing the small
signal stability inthe multi-machine power systems", IEEE Power Engineering Society Winter Meeting, 2001, pp. 352-356.
[13] Rahim, A.H.M.A. Al-Baiyat, S.A., "A robust damping controller design for a unified power flow controller", 39th International
Universities Power Engineering Conference, 2004, pp. 265 269
[14] Lo, K. L., T. T. Ma, J. Trecat, and M. Crappe,A novel power control concept using ANN based multiple
UPFCs scheme, Pro. EMPD 98, Singapore, pp. 570575 (1998).
[15] Tsao-Tsung Ma Multiple Upfc Damping Control Scheme Using Ann Coordinated Adaptive Controllers Asian Journal of Control,
Vol. 11, No. 5, pp. 489 502, September 2009.
[16] HSU, Y.Y. and JENG, L.H.: 'Analysis of torsional oscillations using an artificial neural network'. Presented at the IEEEiPES 1992
winter meeting. paper 92 WM 003-4EC
También podría gustarte
- MMSE Adaptive Receiver vs. Rake Receiver Performance Evaluation For UWB Signals Over Multipath Fading ChannelDocumento13 páginasMMSE Adaptive Receiver vs. Rake Receiver Performance Evaluation For UWB Signals Over Multipath Fading ChannelIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- I 05815457Documento4 páginasI 05815457IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Random Fixed Point Theoremsin Metric Space: Balaji R Wadkar, Ramakant Bhardwaj, Basantkumar SinghDocumento9 páginasRandom Fixed Point Theoremsin Metric Space: Balaji R Wadkar, Ramakant Bhardwaj, Basantkumar SinghIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Application of The Multi-Curve Reconstruction Technology in Seismic InversionDocumento4 páginasApplication of The Multi-Curve Reconstruction Technology in Seismic InversionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- H 05814953Documento5 páginasH 05814953IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- The Experimental Study On The Compatibility Relationship of Polymer and Oil LayerDocumento5 páginasThe Experimental Study On The Compatibility Relationship of Polymer and Oil LayerIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Study On Logging Interpretation Model and Its Application For Gaotaizi Reservoir of L OilfieldDocumento6 páginasStudy On Logging Interpretation Model and Its Application For Gaotaizi Reservoir of L OilfieldIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- G 05913234Documento3 páginasG 05913234IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- A 05910106Documento6 páginasA 05910106IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Effectiveness in Addressing The Sustainability and Environmental Issue Involving Use of Coal Ash As Partial Replacement of Cement in ConcreteDocumento6 páginasEffectiveness in Addressing The Sustainability and Environmental Issue Involving Use of Coal Ash As Partial Replacement of Cement in ConcreteIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- G 05813848Documento11 páginasG 05813848IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- The Identification of Lithologic Traps in Nanpu Sag D3 Member of Gaonan RegionDocumento5 páginasThe Identification of Lithologic Traps in Nanpu Sag D3 Member of Gaonan RegionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Introduction To Accounting Professional Judgment ManipulationDocumento3 páginasIntroduction To Accounting Professional Judgment ManipulationIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- "Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasDocumento4 páginas"Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Strength Properties of Commercially Produced Clay Bricks in Six Different Locations/ States in NigeriaDocumento10 páginasStrength Properties of Commercially Produced Clay Bricks in Six Different Locations/ States in NigeriaIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Validating The Theories of Urban Crime in The City of RaipurDocumento10 páginasValidating The Theories of Urban Crime in The City of RaipurIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Construction of Self-Regulated EFL Micro-Course Learning: Zhongwen LiuDocumento4 páginasConstruction of Self-Regulated EFL Micro-Course Learning: Zhongwen LiuIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- A 05810107Documento7 páginasA 05810107IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- B 05810814Documento7 páginasB 05810814IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Modeling and Design of Hybrid Power Plants: Ahmed KH A. E. AlkhezimDocumento5 páginasModeling and Design of Hybrid Power Plants: Ahmed KH A. E. AlkhezimIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Constructions Quality Versus Bad Components in Jordanian CementDocumento3 páginasConstructions Quality Versus Bad Components in Jordanian CementIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- The Research of Source System On Chang 6 Sand Formation in Ansai OilfieldDocumento5 páginasThe Research of Source System On Chang 6 Sand Formation in Ansai OilfieldIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- I 05745368Documento16 páginasI 05745368IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- G 05743742Documento6 páginasG 05743742IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Assessment of The Life Quality of Urban Areas Residents (The Case Study of The City of Fahraj)Documento6 páginasAssessment of The Life Quality of Urban Areas Residents (The Case Study of The City of Fahraj)IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- D 05741325Documento13 páginasD 05741325IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Detecting Spammers in Youtube: A Study To Find Spam Content in A Video PlatformDocumento5 páginasDetecting Spammers in Youtube: A Study To Find Spam Content in A Video PlatformIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- C 05740912Documento4 páginasC 05740912IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Situational ScrumDocumento15 páginasSituational ScrumsrimkbAún no hay calificaciones
- FY2010 DSM-IV-TR Summary: Division of Juvenile Justice State of Alaska, DHSSDocumento15 páginasFY2010 DSM-IV-TR Summary: Division of Juvenile Justice State of Alaska, DHSSGnostic43Aún no hay calificaciones
- Nueva Vida Outreach Specialist Job DescriptionDocumento2 páginasNueva Vida Outreach Specialist Job DescriptionOffice on Latino Affairs (OLA)Aún no hay calificaciones
- LZW Fundamentals: Lempel Ziv 1977 1978 Terry Welch's 1978 Algorithm 1984Documento9 páginasLZW Fundamentals: Lempel Ziv 1977 1978 Terry Welch's 1978 Algorithm 1984Vishal PatilAún no hay calificaciones
- Ralph M. McInerny - Aquinas and Analogy (1996, Catholic University of America Press)Documento182 páginasRalph M. McInerny - Aquinas and Analogy (1996, Catholic University of America Press)cuba esquivel amadeoAún no hay calificaciones
- Standard Operation Procedures.06 - Potentially Hazardous Foods - Date MarkingDocumento3 páginasStandard Operation Procedures.06 - Potentially Hazardous Foods - Date MarkingJumadi SuburAún no hay calificaciones
- Logic A4Documento1218 páginasLogic A4Alpheios Alpha100% (1)
- Total Productive MaintenanceDocumento41 páginasTotal Productive Maintenancejeff090288Aún no hay calificaciones
- ACS SCPI Programming Guide V1 0Documento29 páginasACS SCPI Programming Guide V1 0Pedro Boanerges Paz RomeroAún no hay calificaciones
- Broadcasting Modernity by Yeidy M. RiveroDocumento34 páginasBroadcasting Modernity by Yeidy M. RiveroDuke University Press100% (2)
- Android Caputre CameraDocumento7 páginasAndroid Caputre CameraSagarraj WangdareAún no hay calificaciones
- IDAS Demonstration Setup Guide F3100D-F5120D PDFDocumento146 páginasIDAS Demonstration Setup Guide F3100D-F5120D PDFTopcom Toki-Voki100% (2)
- ExportDocumento361 páginasExportStefanAún no hay calificaciones
- Using Sales and Operations PlanningDocumento136 páginasUsing Sales and Operations PlanningJose Lara100% (1)
- Book ReviewDocumento1 páginaBook ReviewBaidaAún no hay calificaciones
- Naval Gathering ReportDocumento15 páginasNaval Gathering ReportRafee RevaldiAún no hay calificaciones
- Bhaskar Agarwal CVDocumento1 páginaBhaskar Agarwal CVbhaskaraglAún no hay calificaciones
- Tools of Data CollectionDocumento36 páginasTools of Data CollectionJmarie Calumba100% (1)
- Thermal Comfort Bioclimatic Architecture StrategiesDocumento21 páginasThermal Comfort Bioclimatic Architecture StrategiesJayshree RokdeAún no hay calificaciones
- Resume SasDocumento3 páginasResume Saslubasoft0% (1)
- Oil Based Mud ThinnerDocumento2 páginasOil Based Mud ThinnerjangriAún no hay calificaciones
- Milankovitch Cycles - Earth ClimateDocumento11 páginasMilankovitch Cycles - Earth ClimateJohn MarkakisAún no hay calificaciones
- Four Organizational Culture TypesDocumento4 páginasFour Organizational Culture TypesALTERINDONESIA100% (1)
- SP Racing F3 FC Board(Deluxe) internal OSD Specification and SetupDocumento5 páginasSP Racing F3 FC Board(Deluxe) internal OSD Specification and SetupibyselfAún no hay calificaciones
- Rupali Bank Final 2003Documento29 páginasRupali Bank Final 2003Rupz D TrackerAún no hay calificaciones
- Overqualified Cover LetterDocumento4 páginasOverqualified Cover Letteroyutlormd100% (1)
- Action Research InsetDocumento2 páginasAction Research InsetKenAún no hay calificaciones
- ASTM C 1260 Expansion LimitsDocumento12 páginasASTM C 1260 Expansion Limitsheisin1865Aún no hay calificaciones
- Annex A Lakas High SchoolDocumento60 páginasAnnex A Lakas High SchoolMaycel Vega MarmitoAún no hay calificaciones
- SGSITS Prospectus 2013Documento113 páginasSGSITS Prospectus 2013Rohit Kumar Anchaliya100% (1)