También podría gustarte
- Reexpresion A La Orden de Serv. Pol. Nro. 363 - 2021Documento14 páginasReexpresion A La Orden de Serv. Pol. Nro. 363 - 2021Lauro ramiro saavedra lujanAún no hay calificaciones
- Sistema Nacional de Cualificaciones y Formación ProfesionalDocumento7 páginasSistema Nacional de Cualificaciones y Formación ProfesionalAntonio Miguel Reales MartinezAún no hay calificaciones
- Calidad de ServicioDocumento58 páginasCalidad de ServicioLuciaSantosDeLaGalaChaconAún no hay calificaciones
- Concurso oposición plazas facultativo psicologíaDocumento40 páginasConcurso oposición plazas facultativo psicologíaAna Rosa González BarrosoAún no hay calificaciones
- MÓDULO 4 NoRA (NÓMINA)Documento42 páginasMÓDULO 4 NoRA (NÓMINA)Fatima MarDelAún no hay calificaciones
- Memoria Completa - Proy. Tanatorio PDFDocumento136 páginasMemoria Completa - Proy. Tanatorio PDFFernandez Jose LuisAún no hay calificaciones
- PDF Temario Especifico de Vigilante de Museos Archivos y Bibliotecas - CompressDocumento29 páginasPDF Temario Especifico de Vigilante de Museos Archivos y Bibliotecas - CompressMohammedAún no hay calificaciones
- Habilidades. Todos Los Temas PDFDocumento178 páginasHabilidades. Todos Los Temas PDFAnonymous 3D8vtRAún no hay calificaciones
- Constitucionalismo EspañolDocumento3 páginasConstitucionalismo EspañolJoseluistrjillo100% (1)
- Protocolos de Urgencias y Emergencias Más Frecuentes en El AdultoDocumento290 páginasProtocolos de Urgencias y Emergencias Más Frecuentes en El AdultoMeliza En EmergenciaAún no hay calificaciones
- Leccion de Derecho Administrativo OCWDocumento32 páginasLeccion de Derecho Administrativo OCWDaniel BermejoAún no hay calificaciones
- Tema 3 La Seg SocDocumento7 páginasTema 3 La Seg SocMilagrosa Dávila PeñaAún no hay calificaciones
- Atencion A La Ciudadania PDFDocumento70 páginasAtencion A La Ciudadania PDFXandra Diez GutierrezAún no hay calificaciones
- Tema 39 Adm PDFDocumento125 páginasTema 39 Adm PDFRosa LópezAún no hay calificaciones
- DELINEANTEDocumento9 páginasDELINEANTEReme AguilarAún no hay calificaciones
- Simulacro RespuestasDocumento21 páginasSimulacro RespuestasAngela AngiAún no hay calificaciones
- Sílabo de Taller de Diseño VDocumento6 páginasSílabo de Taller de Diseño VStephanie quesada huaytaAún no hay calificaciones
- Examen LlanesDocumento27 páginasExamen LlanesifaultAún no hay calificaciones
- Tema 4 Los Servicios Sociales ComunitariosDocumento61 páginasTema 4 Los Servicios Sociales ComunitarioslauracriadoreyesAún no hay calificaciones
- Herramientas de identificación de riesgo psicosocialDocumento8 páginasHerramientas de identificación de riesgo psicosocialVictor H. Mendez T.Aún no hay calificaciones
- Ayto Madrid Examen Modelo C 2021Documento16 páginasAyto Madrid Examen Modelo C 2021ofi deltaAún no hay calificaciones
- Plan Nacional de Sensibilización y Prevención de La Violencia de GéneroDocumento23 páginasPlan Nacional de Sensibilización y Prevención de La Violencia de Géneroapi-3742097100% (2)
- Curso prevención riesgos laborales electricidadDocumento60 páginasCurso prevención riesgos laborales electricidadLuis GomezAún no hay calificaciones
- Calendario vacunal y conceptos de salud y enfermedadDocumento13 páginasCalendario vacunal y conceptos de salud y enfermedadlarisaldazAún no hay calificaciones
- Normativa Sobre AccesibilidadDocumento14 páginasNormativa Sobre AccesibilidadAkhesaAún no hay calificaciones
- Evaluación Capítulo 7 CiberseguridadDocumento15 páginasEvaluación Capítulo 7 CiberseguridadCarlos Barcos SincheAún no hay calificaciones
- Programa de CoachingDocumento30 páginasPrograma de CoachingMiguel PoloAún no hay calificaciones
- Plataformas de DescubrimientoDocumento58 páginasPlataformas de DescubrimientoJesús Galán MantecaAún no hay calificaciones
- Tema 2 Temario General (T)Documento25 páginasTema 2 Temario General (T)RMLQAún no hay calificaciones
- Triptico JornadasUNIDIS-UNEDDocumento2 páginasTriptico JornadasUNIDIS-UNEDASOCIACIÓN ASPERGER ISLAS CANARIASAún no hay calificaciones
- UD01 - Conceptos Básicos de La Factura ElectrónicaDocumento76 páginasUD01 - Conceptos Básicos de La Factura ElectrónicaMarisa Pérez SánchezAún no hay calificaciones
- 0908-Planificacion de Regiduria de Espectaculos y Eventos 1ºDocumento43 páginas0908-Planificacion de Regiduria de Espectaculos y Eventos 1ºAndres MinguezaAún no hay calificaciones
- Atención y Apoyo PsicosocialDocumento9 páginasAtención y Apoyo PsicosocialLauraLovesDaniAún no hay calificaciones
- PDF Re EstructuradoDocumento75 páginasPDF Re EstructuradoeuricoAún no hay calificaciones
- BOE-A-2018-16673-Ley Orgánica de Protección de DatosDocumento68 páginasBOE-A-2018-16673-Ley Orgánica de Protección de DatosJose Luis Martin GuinotAún no hay calificaciones
- Guia Trabajo Fin de MasterDocumento24 páginasGuia Trabajo Fin de MasterNoel V̶a̶s̶q̶u̶e̶z̶Aún no hay calificaciones
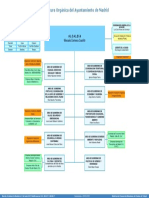
- Organigrama Ayuntamiento de MadridDocumento1 páginaOrganigrama Ayuntamiento de MadridCaridadAún no hay calificaciones
- Tema 10 - Personal Al Servicio de Las Administraciones PublicasDocumento7 páginasTema 10 - Personal Al Servicio de Las Administraciones PublicasManuel Quintana CarrascoAún no hay calificaciones
- ApoyoDomiciliarioLimpiezaDocumento1 páginaApoyoDomiciliarioLimpiezaines lorenzo powrie100% (1)
- Tema Sup TributaDocumento16 páginasTema Sup TributaCristinagp8Aún no hay calificaciones
- Competencias Gobierno Canarias industria, energía, medio ambienteDocumento19 páginasCompetencias Gobierno Canarias industria, energía, medio ambienteAlex Pirker100% (1)
- Entrevista Psicologica 2019.1Documento5 páginasEntrevista Psicologica 2019.1Luisa OrellanaAún no hay calificaciones
- Tecnicas de OficinaDocumento12 páginasTecnicas de OficinaLizeth Olarte100% (1)
- Excel UvigoDocumento24 páginasExcel Uvigoapi-3730693100% (1)
- Examen Las PalmasDocumento13 páginasExamen Las PalmaspepeAún no hay calificaciones
- Comunicación eficaz: elementos y requisitosDocumento34 páginasComunicación eficaz: elementos y requisitosRocío Herrero AnguitaAún no hay calificaciones
- Instrumentos de Recoleccion de Datos Qualitas PDFDocumento52 páginasInstrumentos de Recoleccion de Datos Qualitas PDFantearutgerAún no hay calificaciones
- Recopilacion de Preguntas de LegislacionDocumento22 páginasRecopilacion de Preguntas de LegislacionMARIAN EscorihuelaAún no hay calificaciones
- Administrativas de Gestión Sanitaria de La Administración c1-S01Documento2 páginasAdministrativas de Gestión Sanitaria de La Administración c1-S01SheiAún no hay calificaciones
- Presentación Proyecto IntegralDocumento25 páginasPresentación Proyecto IntegralCarlos Daniel MatadamasAún no hay calificaciones
- Reconocimiento dependencia discapacidad físicaDocumento35 páginasReconocimiento dependencia discapacidad físicaMARIAAún no hay calificaciones
- Test Título I Ley 40 - 2015 - Capítulo III y Capítulo IV. Preparación de OposicionesDocumento7 páginasTest Título I Ley 40 - 2015 - Capítulo III y Capítulo IV. Preparación de Oposicionesjose10519501Aún no hay calificaciones
- 4.actuaciones de EnfermeriaDocumento19 páginas4.actuaciones de EnfermeriaPedro GonzalezAún no hay calificaciones
- AenaDocumento15 páginasAenaCarmen Muñoz MarinAún no hay calificaciones
- BOE A 2001 12770 ConsolidadoDocumento26 páginasBOE A 2001 12770 ConsolidadotakikochanAún no hay calificaciones
- UD2 AlumnosDocumento45 páginasUD2 AlumnosaisaAún no hay calificaciones
- Calculo NumericoDocumento54 páginasCalculo NumericoGiesell100% (1)
- PORTAFOLIO MetodosDocumento31 páginasPORTAFOLIO MetodosSaúl Arturo Camacho GálvezAún no hay calificaciones
- Calculo NumericoDocumento53 páginasCalculo Numericoyolanda rodriguezAún no hay calificaciones
- Metodos Numericos y SimulacionDocumento7 páginasMetodos Numericos y Simulacionruben_hugo_fernandezAún no hay calificaciones
- Calculo NumericoDocumento39 páginasCalculo Numericorgalvan79100% (1)
- Arch 5Documento32 páginasArch 5rgalvan79Aún no hay calificaciones
- Calculo NumericoDocumento39 páginasCalculo Numericorgalvan79100% (1)
- Maestria 2009 1-1Documento6 páginasMaestria 2009 1-1rgalvan79Aún no hay calificaciones
- Sintaxis Smalltalk 1 1Documento5 páginasSintaxis Smalltalk 1 1cac1985Aún no hay calificaciones
- Check List Del Sistema SCAII-SCAF SQLDocumento4 páginasCheck List Del Sistema SCAII-SCAF SQLJairo LombardiAún no hay calificaciones
- Ensayo Nia 230Documento4 páginasEnsayo Nia 230Arianna DelaCruz100% (4)
- Catalogo 2006 FestoDocumento264 páginasCatalogo 2006 FestoFrodo Rohan Rivendell0% (1)
- Programas en Visual Basic 6 - Bandas y CilindrosDocumento6 páginasProgramas en Visual Basic 6 - Bandas y CilindrosJohn Fredy Martínez CardonaAún no hay calificaciones
- Diseño de torre para auto en SolidWorksDocumento77 páginasDiseño de torre para auto en SolidWorksKevin Fabian Santiago BonoraAún no hay calificaciones
- Pert CPMDocumento20 páginasPert CPMEdwin Viche100% (3)
- How Google WorksDocumento5 páginasHow Google WorksAlan Ortiz PimentelAún no hay calificaciones
- Cebek CD-28 PDFDocumento52 páginasCebek CD-28 PDFibor747Aún no hay calificaciones
- Estadistica 2Documento4 páginasEstadistica 2PEDROAún no hay calificaciones
- Fundamentos de Estructura de DatosDocumento23 páginasFundamentos de Estructura de DatosStacey SnyderAún no hay calificaciones
- Algoritmos en CDocumento33 páginasAlgoritmos en CPAPAI_donimAún no hay calificaciones
- Implementación de Controles PresupuestariosDocumento3 páginasImplementación de Controles PresupuestariosSergio CabralAún no hay calificaciones
- Delimitacion de Cuenca Hidrologica Alex Segovia RiosDocumento36 páginasDelimitacion de Cuenca Hidrologica Alex Segovia RiosSantiagoMoralesCordovaAún no hay calificaciones
- Modelo Idealizado de CaltransDocumento17 páginasModelo Idealizado de CaltransOscar OsKrAún no hay calificaciones
- Teorema Central de LimiteDocumento3 páginasTeorema Central de LimitenemebuAún no hay calificaciones
- TESIS Rev.5 1Documento21 páginasTESIS Rev.5 1jvsv11100% (1)
- Cobit 4.1 Vs Cobit 5Documento28 páginasCobit 4.1 Vs Cobit 5Freddy Esparza50% (2)
- Coplas A Mis CompañerosDocumento10 páginasCoplas A Mis CompañerosAnonymous Bw6r96c0% (1)
- Practica Programación IIDocumento6 páginasPractica Programación IILUISMIAún no hay calificaciones
- MetrologìaDocumento79 páginasMetrologìaHéctor Fidel Chire RamírezAún no hay calificaciones
- Checklist SoftwareDocumento18 páginasChecklist SoftwaredreastmaAún no hay calificaciones
- Polinomios de LagrangeDocumento5 páginasPolinomios de LagrangeCeleo EscoberAún no hay calificaciones
- Cisco 1711 y 1712 Security AccessDocumento14 páginasCisco 1711 y 1712 Security AccessyayoneitorAún no hay calificaciones
- Manual Del Usuario DdTraDaDocumento89 páginasManual Del Usuario DdTraDaBerna Camarena100% (1)
- T4 - Probabilidad y Estadística - Cabrera Peralta Gerardo YahirDocumento15 páginasT4 - Probabilidad y Estadística - Cabrera Peralta Gerardo YahirYayo CabreraAún no hay calificaciones
- Ejercicio Ejemplo Automatización de Procesos IDocumento3 páginasEjercicio Ejemplo Automatización de Procesos IDavis Gabriel OlsemAún no hay calificaciones
- ArraysDocumento12 páginasArraysRaúl M. Vásquez Pacheco100% (1)
- Manual Encuestador ENAHO 2015Documento407 páginasManual Encuestador ENAHO 2015LizbethOlorteguiAún no hay calificaciones
- Herramientas de Ofimática 10-1Documento4 páginasHerramientas de Ofimática 10-1maria fernanda sanchez paez100% (1)