También podría gustarte
- VVVF DrivesDocumento16 páginasVVVF DrivesIsradani MjAún no hay calificaciones
- Inspection ReportDocumento4 páginasInspection Reportaryo suryandaruAún no hay calificaciones
- Menzel World CementDocumento37 páginasMenzel World CementputrasejahtraAún no hay calificaciones
- General Purpose Slip-Ring Induction Motors: Product CatalogueDocumento12 páginasGeneral Purpose Slip-Ring Induction Motors: Product Catalogueرضوان محمد مرعي كاملAún no hay calificaciones
- Power Systems Protection Course: Al-Balqa Applied UniversityDocumento37 páginasPower Systems Protection Course: Al-Balqa Applied UniversityLimuel Espiritu100% (1)
- Advantage IEC Cast Iron MotorsDocumento15 páginasAdvantage IEC Cast Iron MotorsHiran WittachyAún no hay calificaciones
- FAQ About Drives Technology: Explanation About The Order No. of The New 1LE1 Generation of Aluminium MotorsDocumento14 páginasFAQ About Drives Technology: Explanation About The Order No. of The New 1LE1 Generation of Aluminium MotorsWhite TigerAún no hay calificaciones
- Leonova Diamond TD Sheet 2Documento10 páginasLeonova Diamond TD Sheet 2Ahmed Mohamed HassanAún no hay calificaciones
- Motor WindingsDocumento12 páginasMotor WindingsAbiodun IloriAún no hay calificaciones
- Unit 3 SRMDocumento66 páginasUnit 3 SRMDr SriAún no hay calificaciones
- ABB - General Purpose Motors Cast Iron - GB 092003Documento49 páginasABB - General Purpose Motors Cast Iron - GB 092003ivanjaviergutierrezoAún no hay calificaciones
- Form - Wound - Repair - Specification Rewinding PDFDocumento10 páginasForm - Wound - Repair - Specification Rewinding PDFBenjie CallantaAún no hay calificaciones
- Vibration Analysis: How Does It Work?Documento18 páginasVibration Analysis: How Does It Work?Rahul TaleAún no hay calificaciones
- TI - Motor Control CompendiumDocumento221 páginasTI - Motor Control CompendiumhagdincloobleAún no hay calificaciones
- TND6041-D DC Motor Driver FundamentalsDocumento3 páginasTND6041-D DC Motor Driver FundamentalsAlex CarmonaAún no hay calificaciones
- Single Phase I.M. Understanding LevelDocumento3 páginasSingle Phase I.M. Understanding LevelK S Ravi Kumar (MVGR EEE)Aún no hay calificaciones
- 71951B LeonovaDiamond SpreadDocumento8 páginas71951B LeonovaDiamond SpreadRajesh BeheraAún no hay calificaciones
- Motor Connections DiagramDocumento1 páginaMotor Connections DiagramDinhnamsgpAún no hay calificaciones
- SRM Using Arduino PDFDocumento9 páginasSRM Using Arduino PDFChristian AztecaAún no hay calificaciones
- Biot Savart LawDocumento3 páginasBiot Savart LawArdani MunaqiAún no hay calificaciones
- ATB - Explosition Proof Motors EEXDocumento122 páginasATB - Explosition Proof Motors EEXSergey KrylatovAún no hay calificaciones
- Importance of Insulation Resistance Testing2Documento25 páginasImportance of Insulation Resistance Testing2FaisalAún no hay calificaciones
- Speed Control of Induction Motors - 2 PDFDocumento22 páginasSpeed Control of Induction Motors - 2 PDFZariz ZakianAún no hay calificaciones
- Water Jacket Motor PDFDocumento8 páginasWater Jacket Motor PDFsultaniusAún no hay calificaciones
- Development of Electric Drives in Light Rail Transit (LRT) SystemDocumento31 páginasDevelopment of Electric Drives in Light Rail Transit (LRT) SystemArjun Pratap Singh100% (1)
- Current SensingDocumento6 páginasCurrent Sensingboslim1580Aún no hay calificaciones
- Determining The Efficiency of Induction Machines, Converters and SoftstartersDocumento8 páginasDetermining The Efficiency of Induction Machines, Converters and Softstarterssadeq03Aún no hay calificaciones
- Wound Rotor Motor TestingDocumento5 páginasWound Rotor Motor Testingbige1911Aún no hay calificaciones
- Induction MoterDocumento20 páginasInduction MoterShafiuddin HabeebAún no hay calificaciones
- Standard and Measurement of Motor VibrationDocumento2 páginasStandard and Measurement of Motor VibrationNam Lê HữuAún no hay calificaciones
- Induction MotorsDocumento25 páginasInduction Motorsapi-3827132100% (2)
- Insulation ResistanceDocumento2 páginasInsulation ResistancegansaikngaiAún no hay calificaciones
- Motors:: The Past Is PresentDocumento6 páginasMotors:: The Past Is Presenteko bagus sunaryoAún no hay calificaciones
- Current Lead and Lag ConceptDocumento2 páginasCurrent Lead and Lag ConceptUsman AmeenAún no hay calificaciones
- Industrial SR BrochureDocumento4 páginasIndustrial SR BrochureArinder SinghAún no hay calificaciones
- CHAPTER 3 Induction Machine PDFDocumento32 páginasCHAPTER 3 Induction Machine PDFhailay haderaAún no hay calificaciones
- Speed Control of Switched Reluctance Motor-LibreDocumento9 páginasSpeed Control of Switched Reluctance Motor-LibreIndrajithSrAún no hay calificaciones
- 3 Phase Induction Motor Speed Control Using PIC PDFDocumento18 páginas3 Phase Induction Motor Speed Control Using PIC PDFAmmar Al-Kindy100% (2)
- Rotary Encoder - Wikipedia, The Free EncyclopediaDocumento7 páginasRotary Encoder - Wikipedia, The Free EncyclopediaSigid AriewibowoAún no hay calificaciones
- TEFC Vs WP II MotorsDocumento3 páginasTEFC Vs WP II Motorsindranilch100% (1)
- Induction MotorDocumento7 páginasInduction MotoruwaifotonyAún no hay calificaciones
- Switched Reluctance Motor (SRM)Documento8 páginasSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahAún no hay calificaciones
- Switched Reluctance Reluctance Motors and ControlDocumento47 páginasSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Comparison of VPI and Resin-Rich Insulation SystemsDocumento1 páginaComparison of VPI and Resin-Rich Insulation SystemsJose Mayen100% (1)
- P34amk039510 enDocumento109 páginasP34amk039510 enColesha BarukaAún no hay calificaciones
- Siemens Basics of AC DrivesDocumento116 páginasSiemens Basics of AC DrivesSleman ShackoorAún no hay calificaciones
- Induction MotorDocumento39 páginasInduction MotorAhmed MagdyAún no hay calificaciones
- Induction Machines & Synchrnous Machines New-2Documento74 páginasInduction Machines & Synchrnous Machines New-2thamizmaniAún no hay calificaciones
- 3-Phase Induction Motor GuideDocumento108 páginas3-Phase Induction Motor GuideKshitij ShrivastavaAún no hay calificaciones
- ECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsDocumento42 páginasECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsVikas Roy100% (1)
- Lecture - 2 - Torque-Speed Characteristics of 3-Phase IMDocumento8 páginasLecture - 2 - Torque-Speed Characteristics of 3-Phase IMDina GaranAún no hay calificaciones
- Induction Motor 1Documento37 páginasInduction Motor 1MasterArvinAún no hay calificaciones
- Kramer DriveDocumento42 páginasKramer DriveSenthil Kumar100% (1)
- Induction Motors: The Concept of Rotor SlipDocumento12 páginasInduction Motors: The Concept of Rotor Sliphafiz_jaaffarAún no hay calificaciones
- Induction Motor Drive Control MethodsDocumento8 páginasInduction Motor Drive Control MethodsRudra Kumar MishraAún no hay calificaciones
- ECEG-3132 Electrical Engineering Lab-IV Final Exam Answer KeyDocumento4 páginasECEG-3132 Electrical Engineering Lab-IV Final Exam Answer Keyhelen tsegayAún no hay calificaciones
- Induction MachineDocumento48 páginasInduction MachinechethanAún no hay calificaciones
- 16 and 2 MARKS For CIA IIDocumento4 páginas16 and 2 MARKS For CIA IIkesavantAún no hay calificaciones
- Beee Unit-4 Induction & Synchronous MotorsDocumento27 páginasBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriAún no hay calificaciones
- Generator ProtectionsDocumento3 páginasGenerator ProtectionsGnanaseharan Arunachalam100% (1)
- D.C. Generators MCQ PDFDocumento22 páginasD.C. Generators MCQ PDFYasir Arafin TonmoyAún no hay calificaciones
- Ac and DC Machines Objectives Type QuestionsDocumento6 páginasAc and DC Machines Objectives Type QuestionsJohn Norie BaydalAún no hay calificaciones
- Electric Machine: Induction MotorDocumento32 páginasElectric Machine: Induction MotorOkezaki TemoyoAún no hay calificaciones
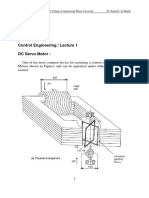
- DC Servo Motor Control ModesDocumento7 páginasDC Servo Motor Control Modesjin kazamaAún no hay calificaciones
- AC Single Phase Induction Motor Instruction Manual GuideDocumento5 páginasAC Single Phase Induction Motor Instruction Manual GuideDinesh Kumar MehraAún no hay calificaciones
- Three phaseInductionMotorTypesandStructureDocumento12 páginasThree phaseInductionMotorTypesandStructureShivam ShindeAún no hay calificaciones
- 3301 PDFDocumento2 páginas3301 PDFসায়ন্তন দত্তAún no hay calificaciones
- Cam Tech Hitachi TM El Locoeng 05Documento58 páginasCam Tech Hitachi TM El Locoeng 05santhosh kumarAún no hay calificaciones
- 2000w BLDC Motor Specs and Controller DetailsDocumento13 páginas2000w BLDC Motor Specs and Controller DetailsGaurav ChaudhariAún no hay calificaciones
- Single Phase Induction Motor and Special MachinesDocumento29 páginasSingle Phase Induction Motor and Special MachinesAlisha DasAún no hay calificaciones
- Ch4 AC Machine FundamentalsDocumento45 páginasCh4 AC Machine FundamentalsMuhammad R Shihadeh100% (4)
- 345C Excavator Electrical System: Area ADocumento4 páginas345C Excavator Electrical System: Area Acandido vargas gutierrezAún no hay calificaciones
- Rotor Article (LEXSCECO)Documento2 páginasRotor Article (LEXSCECO)Joako TorresAún no hay calificaciones
- PMMC InstrumentsDocumento7 páginasPMMC InstrumentsHanie MunirahAún no hay calificaciones
- Armature ReactionDocumento16 páginasArmature ReactionATCAún no hay calificaciones
- Teori MSTEPDocumento144 páginasTeori MSTEPDaniel Sopian FernandesAún no hay calificaciones
- Coil Winding Technology - WikipediaDocumento25 páginasCoil Winding Technology - WikipediaHyan GontijoAún no hay calificaciones
- Stepper Motor ControlDocumento8 páginasStepper Motor ControlAyaz FaisalAún no hay calificaciones
- Magnet-Less Electrical MachinesDocumento10 páginasMagnet-Less Electrical MachinesReeta DuttaAún no hay calificaciones
- Stepper Motors: Design GuideDocumento12 páginasStepper Motors: Design Guidesantoshgaonkar1997100% (1)
- Electrical Engineering: Electric MachinesDocumento14 páginasElectrical Engineering: Electric Machines45satishAún no hay calificaciones
- 8.4 Transformer 2017Documento17 páginas8.4 Transformer 2017fillyana01Aún no hay calificaciones
- 17415Documento6 páginas17415sahil satputeAún no hay calificaciones
- Price List Cts Ae 05.02.21Documento13 páginasPrice List Cts Ae 05.02.21TILAK RAJ KambojAún no hay calificaciones
- White Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2Documento13 páginasWhite Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2tekhakkoAún no hay calificaciones
- Toroids For The Terrified PDFDocumento7 páginasToroids For The Terrified PDFJonathan ReaAún no hay calificaciones
- DC Machinery Fundamentals 2: Internal Generated Voltage and Induced Torque Equation For Real DC MachineDocumento10 páginasDC Machinery Fundamentals 2: Internal Generated Voltage and Induced Torque Equation For Real DC MachineVicAún no hay calificaciones
- Learn About TransformersDocumento47 páginasLearn About TransformersBu Dak100% (1)