También podría gustarte
- 2.1 Relaciones de TransformaciónDocumento3 páginas2.1 Relaciones de TransformaciónKärem Thatzkii López0% (1)
- Líneas de Transmisión de MicrocintasDocumento4 páginasLíneas de Transmisión de MicrocintasKärem Thatzkii LópezAún no hay calificaciones
- 2.1 Convertidores Ac-DcDocumento15 páginas2.1 Convertidores Ac-DcKärem Thatzkii López50% (2)
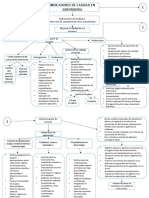
- Indicadores de Calidad de EnfermeriaDocumento3 páginasIndicadores de Calidad de EnfermeriaKärem Thatzkii López100% (3)
- Examen 1er Parcial Resistencia de Materiales 2A VES INGDocumento1 páginaExamen 1er Parcial Resistencia de Materiales 2A VES INGJessica Hernándes VelozAún no hay calificaciones
- ModeladoDocumento49 páginasModeladoEnergon100% (1)
- Alcohol Gel de EucaliptolDocumento31 páginasAlcohol Gel de Eucaliptolafma.199271% (14)
- Atomo, MoleculasDocumento31 páginasAtomo, MoleculasFaisury Paola RinconAún no hay calificaciones
- Demo FCM v5 1.ppsDocumento21 páginasDemo FCM v5 1.ppsJesùs AlbertoAún no hay calificaciones
- Círculos y Circunferencias Áreas y Perímetros PDFDocumento65 páginasCírculos y Circunferencias Áreas y Perímetros PDFRonaldiño Chininn HerreraAún no hay calificaciones
- Materialismo Mecanicista o MecánicoDocumento3 páginasMaterialismo Mecanicista o MecánicoJoni Junior Cantini100% (1)
- SGBD UD3 Boletin 6 SQL SolucionDocumento5 páginasSGBD UD3 Boletin 6 SQL SolucionFerre FerrerAún no hay calificaciones
- PyE I - Parcial 1 - Tema A - Grupo 2 - 20182 PDFDocumento2 páginasPyE I - Parcial 1 - Tema A - Grupo 2 - 20182 PDFDaniel PulidoAún no hay calificaciones
- Informe Adeline Perceptron MulticapaDocumento13 páginasInforme Adeline Perceptron MulticapaJhoselyn Jara EspinozaAún no hay calificaciones
- Monografia Motores ElectricosDocumento21 páginasMonografia Motores Electricosemerson leyva león100% (1)
- Lectura de FraccionesDocumento4 páginasLectura de FraccionesAlexandra DuarteAún no hay calificaciones
- Tarea Nro 2-Producto Escalarl - UNEFADocumento4 páginasTarea Nro 2-Producto Escalarl - UNEFARafael EllesAún no hay calificaciones
- LogaritmosDocumento4 páginasLogaritmosNestor AQAún no hay calificaciones
- Memoria de Calculo DesarenadorDocumento15 páginasMemoria de Calculo Desarenadorcesar santosAún no hay calificaciones
- Guía Declaración Mensual de Impuestos (DMI-V2) F1-280718Documento12 páginasGuía Declaración Mensual de Impuestos (DMI-V2) F1-280718Salomon Zepeda100% (1)
- Doble Tratamiento SuperficialDocumento2 páginasDoble Tratamiento SuperficialLorenzoAún no hay calificaciones
- Taller de Refuerzo II Periodo Matematicas 1Documento3 páginasTaller de Refuerzo II Periodo Matematicas 1Jose Acosta AlvaradoAún no hay calificaciones
- Angulos Formados Por Bisectrices y Congruencia de TriangulosDocumento1 páginaAngulos Formados Por Bisectrices y Congruencia de TriangulosMiguel Angel Sandoval LauraAún no hay calificaciones
- Manual de Estandares y Pets Del Metodo de Minado Corte y Relleno Ascendente C&ra Minera BateasDocumento9 páginasManual de Estandares y Pets Del Metodo de Minado Corte y Relleno Ascendente C&ra Minera BateasfabriAún no hay calificaciones
- 6° Grado - Actividad Del 18 de MayoDocumento25 páginas6° Grado - Actividad Del 18 de MayoLeonela Barja SalazarAún no hay calificaciones
- Divisibilidad MCM y MCDDocumento10 páginasDivisibilidad MCM y MCDEdith MagallanesAún no hay calificaciones
- Capitulo 11Documento43 páginasCapitulo 11c2franco23Aún no hay calificaciones
- Alcoholes - 4° SECDocumento37 páginasAlcoholes - 4° SECPerseo RellAún no hay calificaciones
- Resumen de Las Meditaciones Metafísicas de René DescartesDocumento9 páginasResumen de Las Meditaciones Metafísicas de René DescartesDon Este79% (14)
- Informe de TransformadoresDocumento5 páginasInforme de TransformadoresJorge TorrezAún no hay calificaciones
- Parte 2 - Plan de Validación (R28)Documento32 páginasParte 2 - Plan de Validación (R28)Cecilia AvilaAún no hay calificaciones
- Taller Procesos de FundicionDocumento7 páginasTaller Procesos de FundicionFelipe FlorezAún no hay calificaciones
- 12.1. Analisis de ConsistenciaDocumento15 páginas12.1. Analisis de ConsistenciaMauricio Minaya SilveraAún no hay calificaciones
- Analisis Matemático IIIDocumento18 páginasAnalisis Matemático IIIomarAún no hay calificaciones