Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Contol Movimiento - Cekit
Cargado por
FRBM20 calificaciones0% encontró este documento útil (0 votos)
211 vistas30 páginascekit
Título original
Contol Movimiento.cekiT
Derechos de autor
© © All Rights Reserved
Formatos disponibles
PDF o lea en línea desde Scribd
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentocekit
Copyright:
© All Rights Reserved
Formatos disponibles
Descargue como PDF o lea en línea desde Scribd
0 calificaciones0% encontró este documento útil (0 votos)
211 vistas30 páginasContol Movimiento - Cekit
Cargado por
FRBM2cekit
Copyright:
© All Rights Reserved
Formatos disponibles
Descargue como PDF o lea en línea desde Scribd
Está en la página 1de 30
‘Capitulo 1
:Medicion y control
de movimiento
1a medicidn y el control de mavimianto constituyen un aspecto
fundamental dentro de muchos procesos industriales. En esta actividad
analizaremos el manejo y funcionamiento de varios tipos de sensores
que pueden ser utilizados para medir proximidad, posicién, velocidad y
otros tipos de variables relacionadas con sistemas de control de
movimiento.
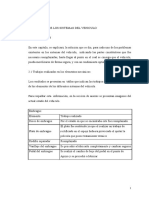
EI manejo ae prictica es del tipo nc
sensores inductivos — malmente abierto, refe-
Enire los sensores de proximi- _rencia XSIM18MA250, iam
dad mds comunes se encuen- estado en el cual perma- i :
tran los sensores inductivos. — nece ON el LED indic: (thread rnin
Anal iGnel dor verde, figura 1.3. H Hy
manejo y caracteristicas téeni--_ También existen los nor-
cas de estos sensores, toman- malmente cerrados. Al
do como base un se detectar la pronitnidad de
familia XS-M de la ‘un material ferromagné-
Temecanique. tico, el contacto se cierra
y se enciende la luz roja. Este también que el sensor tiene dos
La apariencia fisica de este sensor, en particular, posee un alambres, uno azul y uno ma-
tipo de sensor y sus dimensio- sistema de proteccién contra rrén, El alambre marrén co-
nes reales las podemos apreciarcortocircuitos accidentales. _rrespondea la alimentacién y el
en las figuras 1.1 y 1.2.respec- Cuando una situacién de esta azul es la salida, Existen otros
tivamente, En la porte inferior, naturaleza se prosenta,elsensor sensores que pueden toner tres
el sensor posee dos LEDs indi- se desconecta automaticamen- 0 hasta cuatro cables. Por esto,
cadores, uno rojo y uno verde. te yel indicador verde empieza es completamente indispensable
Elsensorque ullizamosenesta a parpadear. Vodemos apreciar leer en la noya de datos la asig-
semos en esti oc:
EMIT + Curso Practico de Electronica Industrial y Automatizacion ~~
Medicion y control de proximidad
de no lo puedan pisur o halar
Debido a que estos sensores se
deben colocar muy cerea al ob-
yelo que se va a medit, es muy
comin que, debido a una base
frdgil, el sensor se mueva un
poco y tenga contacto directo
con el objeto a sensar, caussin-
20m o dale di
fision irreversible
var el comportamiento en el
‘momento de la conmutaci6n,
decirenel momento quedetec- que se hale el cable del sen-
ta la proximidad del cuerpo sor. También se recomienda
metilico. Enese instante secie- que el cable quede dispuesto
ra el contacto del relé,el cual en Ifnea recta por lo menos 10
se lleva aun contador decadal em después del sensor. Una
con salida para display. Antes vez adoptada esta medida, se
de eso, se incorpora una etapa puede doblar el cable en cual
or a, figura 1.7.
recomendable que el
s eable ny quede templado, ni
rebote pura facilitarlalee- quer direcei
tura del contador,
Puesto que con este sensor
Una aplicacion sencilla de Se pueden manejar tensiones
este tipo de montaje es el con- muy altas, estas pueden ser pe-
to de eventos. En este caso, ligrosas para los operarios. Por
se hizo el montaje sobre una esta raz6n es muy importante
miiquina que empacaal vacfo, _ desconectar la alimentacién an-
laune Alli se registra al némera da tes de preeder a realizar cuale
delosalambres, pues tunmalen- veces que baja la Kimina so- _quier servicio nico, Entre las
tendimiento de esas caracteris- bre cl producto que se va a caructeristicas eléctricas de este
ticas puede tenerconsecuencias — crupacar, figura 16. sensor tenemos un rango de vol-
lamentables. taje comprendido entre 20 y 264
Una de las precaueiones de V (directa o alterna), un consu-
La instalacién eléctrica de instalacién més importantes que mo de comente por debajo de
este sensor se debe hacer en se deben tener en cuenta al ins- 15 mA, cafda de voltaje menor
serie, como se muestra en Ia talareste tipodesensoresesco- 5.5 Vy una corriente de con-
figura 1.4. En lafigura 1.5 0b- _jocarlo en un sitio seguro, don- _ mutacién entre 100 y 300 mA.
servamos el diagrama esque-
‘in de faineianes a en
tice de orta prictica, concie 9), SENSO" b) (Sensor Fusible
de asta prict : ioe inductive GFP,
tente en una conexidn bisica de ~~ 7A
este sensor en serie con un rele.
Allmentando el sensor con babe ines
Rois Relé
24VDC y conectdindolo en se-
rie ala bobina del rele, también
de 24 voltios, podemos obser-
qsitldadeg
2 curso Prietico de Electrinica Industrial y Automatizacion * CEKAT
&
ica Industrial
Descripcion del
montaje
En la figura 1.5 podemos ver
el diagi
ama del circuilo que
cuenta los pulsos generados por
el sensor inductivo en el mo-
mento en que la plancha baja
Note que el sensor no necesita
contacto fisico con el objeto a
dotectar. Estos pulsos son regis
tendas en un display Fleireni-
to consta de un contador BCD
7490, un decodificador 7447 y
uuu display Ue sicte seginrentes
de nodo comin, Para evitar
falsos disparos, se incorporé un
circuito antirebote con dos
compuertas Schmitt trigger, ka
resistencia R2 y el condensa-
dorelectrolitico C1. A la ent
da se conects la resiotencia Rt
en modo pull up.
‘a maquina que se esta ins-
trumentando empaca al vaefoun
conjunto de elementos electré-
nicos (kits) a través del calor.
Paraello, existe una plancha que
haa y tape los provinctos a em-
pacar y permanece alli por un
tiempo determinado mientras el
payucte yucda listo. EL objetivo
de esta préctica es contar el nti
mero de empaques que se reali-
an, Esto se logra detectando
ces que baja a plancha, figuras
Loy 17.
Los sensores inductivos
tienen varias ventajas, entre
ellas que son poco afectados
por la humedad ambiental y
otros contaminantes. Ademds
pueden medir a grandes velo-
cidades (hasta 2,000 deteccio-
wado) y también
edir otras magnitu-
nes por »
permitenn
Figura 1.7 Inst
EBKET + Curso Préctico de Electrinico Industrial y Automatizacin
des sé algiin dispositive, ado
cuado las convierte en despla.
vamiento, Para detectar una
wa, por ejen=
plo, basta con detectar ta de~
flexi6n de un elemento defior-
mable, tal como una platina
fuciza dete
metlica
Usos tipicos
Herramientas y maquinarias
para cortar y formar metal,
transportadoras y Iineas de
transferencia, maquinaria para
procesar y empucar alimentos,
maquinaria textil, ascensores,
grtias y montacargas, sistemas
automatizados para almacenar
¥ sacar objetos, ete.
Sensores
capacitivos
Los scnsores capacitivos fun-
cionan gracias al cambio de la
capacitancia causado por el
cuerpo a sensar, por lo que pue-
den detectar materiales dieléc-
tricos como papel, vidrio, ma-
dera, etc. Generalmente, tienen
el doble de alcance que los sen-
sores de tipo inductive. La de-
teccién por principios capaci-
tivos depende mucho de las ca-
aeieristivas fisicas del cueipo
a ser sensado. Por ejemplo, el
Figura 18 Apa 20
ctividedes
6
Webs
n y control de proximidad
| cana
ra 1.9 Esquemas
resultado de la deteecién de una
botella dependeré del tipo de
botella y del contenido de la
misma, tal como se mostrari en.
la presente actividad practica,
en lacual aprovecharemos esta
propiedad para la deteccién del
Henado de un recipiente.
“1 nuestra axperion
cia, utilizaremos el sensor
XT4P18PA372 de Telemeca-
unique, figuna 1,8, Este seusor
utiliza en su salida un inte
rruptor de estado sélido, por
lo que necesita una alimenta
cidn permanente. Ejemplos
de interruptores de estado s6-
lido son los transistores, los
TRIACS y los SCRs. Este
sensor, en particular, posee
transistores para la conmuta-
cin de la carga a conectar
aa carga conectada a la
salida, normalmente la bobina
de un relevo o una carga res
tiva, debe tener un consumo de
corriente dentro del
pecificado en la hoja técnica del
dispositivo. Si el consumo de
la carga es muy debil, dicha
carga puede activarse sin que
el sensor haya detectado el
mento alguno. Asimismo, st el
consumo es grande, el sensor
no serd capaz de activarla cut
do detecte el objeto.
Debido a que os transisto-
res poseen una polaridad defini
da, solamente permiten que la
corriente circule en una direc
cin. Por esta razin, los senso-
res can salida a transistor no pac
den usarse en corriente altema.
Especificamente, slo pueden
teuer duy forss Ue Conenicn
dependiendo del transistor utili-
zado, figura 1.9, Para el transis-
tor NPN, Ja carga se conecta al
hilo positivo (conexisn tipo su-
midero). mientras que para el
PNP la carga se conecta al hilo
negativo (conexidn tipo fuente),
El sensor que estamos uti-
lizando posce tres hilos de sa-
lida, 18 cuales corresponden a
Curso Prictico de Electrénica Industrial y Automaticacion * CAT
Electronica Indu
Ja alimentacién positiva (ma-
rén), a la entrada negativa
(azul) y a la salida 0 conexi6n
de Ta Carga (negro), Lat carga
debe conectarse externamente
entre la salida y uno de los
alambres de alimentacién, de-
pendiendo del tipo de conexién
que se vaya a utilizar. La ven-
taja de esta configuracién es
que la corriente de la fuente no
atravesard la carga. Por
aida de voltaje y la corriente
de fuga seran bajos, figura 1.9.
to la
El sensor posee en su par-
te posterior un LED indicador
que a la vez sirve como testi-
‘go para calibrar la distancia de
Hatoccién Feta operacién se
realiza por medio de un ator-
nillador, el cual normalmente
viene incluidy vou ef payuete
del sensor. Mediante el mis-
mo, se puede aumentar o dis-
minuir el alcance de deteccién,
girando hacia la derecha o ha-
cia la izauierda. respectiva-
mente, el tornillo de ajuste del
sensor. Para nuestro sensor,
este aleance es ajustable en un
rango entre 0 y 3/4" de pulga-
da (19 mm), figura 1.10.
Un aspecto importante
que se debe observar en las
hojas de datos del fabricante
es la frecuencia de operacién
ar del dispositive. para
eguramnos que el sensor es
el adecuado para nuestra apli-
cacidn, Este par
fiere a la velocidad maxima
que pueden tener los cuerpos
obyetivos bajo la cual el sen-
‘ial
sor es capaz de detoctarlos
tisfactoriamente. Debido a que
este es un parametro estanda-
rizado, petmive comparat prv-
ductos de distintos fabricantes.
Sin embargo, como regla pra
tica tenga siempre en cuenta
{que los sensores pequeiios y de
alimentacién DC son mas r
pidos que los sensores grandes
y de alimentaci6n AC.
1
En nuestra aplicacién, poo
demos utilizar la conexién bé-
sica mostrada en la figura 1.9,
conecuuidy en ENE Casy ut
carga de tipo inductive (un
relé), En citcuitos de corrien-
te DC, cuando una carga in-
ductiva se abre, la polaridad de
la cortiente se invierte hasta
que se disipe Ia energfa alma-
cenada en la bobina. El resul-
Tabla de Caracteristicas Eléctricas
Tensién nominal
Corriente da conmutacisn
Caida de voltjo
Frecuencia de operacién
“Temperatura de operacion
12-24 VDC
0-890 ma,
<2V
10 Hz
Entre -25 y 70
BUCKET + Curso Prictico de Electrénica Industrial y Automatizacién “7
Medicion y control de proximidad
tado do tal efecto es un sobre dentro do un envase:
de un amplificador, en ol cual
voltaje a través del dispositi- este casoeloruro de hierro. El se conectan ambos cables, el
yo que esté controlando dicha sensor debe calibrarse para de recepcién y el de transmi-
bobina, Afortunadamente los que detecte eI trasco Solo sion. EN Ia Figura 1.13 vemos,
sensores actuales poseen un cuando éste posea el material el amplificador utilizado en
mecanismo en paralelo con el deseado en su interior, ya que esta priictica, el cual corres-
suiche para suministrar una el mismo envase puede acti-.ponde a la referencia XUD
conexi6n de la energiaalabo- — varlo erréneamente. H003537 de Telemecanique.
hina de manera segura
Como recomendaciones EI principio de funciona-
Adyertencia: Antes de conec- finales, tenga en cuenta que es- mento de la deteccién con fibra
nsiste
tar la fuente de voltaje, se debe tos sensores son delicados, por Sptica es muy simple.
chequear su compatibilidad lo que se debe evitar pisarlos — en colocar alineados un receptor
con la carga conectada y el dis- o halarsus cables de conexién, _y un transmisor de sefial éptica.
positivo que esté utilizando. — Ademés, debe extremar los Si un objeto, que posea al me-
cuidados en la conexién de los nos la misma dimensién del did
distintos elementos externos. metrodel haz, pasa por el medio
Los sensores que se al
mentan entre 10 y 24 VDC se deestosdos elementos, interum-
deben proteger contra polari- Deteccién de objetos _ peelhazdeluzyel receptorpue-
dad inversa y contra cortorcir Con fibra dptica do originar una eefal de alerta,
cuitos, Cualquier descuido pue- La ventaja de usar este tipode figura 1.14. El rango tipico de
de ocasionar un dafio irrever- sensor es su aplicabilidad en alcance de estos sensores es del
sible en el Sensor. En a flgura casos donde las restricclones orden de 0.30 pulgadas (1.2m).
LIL, se observa el voltaje me-_fisicas impiden que se insta-
dido en la bobina del relé des- len sensores capacitivos o in- Respuesta
pugs de detectarel cuerpo. __duetivos; por ejemplo proce- en el tiempo
sos con altas temperaturas © Analicemos aqui este parime-
Una de los mayores limitan que involucren fuertes rea tro, que igual se aplica a los
tes de este tipo de sensores son ciones quimicas. demés tipos de sensores y cu-
las condiciones atmosféricas. yos valores nominales se en-
Por ejemplo, las temperatura: Lautilizaci6n de fibra 6p-_cucntran especificados en las
excesivas pueden disminuir el tica en la deteccién de objetos » hojas técnicas. Se define como
rangodesensibilidadhastaen un siempre va ligada con el uso la duracién del tiempo reque-
20%. De igual manera se nido para que el sensor
recomienda no exponeres- (por medio de un circuito
tos dispositivos en ambien- 4 “> intemo denominado inter-
tes.con rocfo, pues ka hume- faz de disparo) origine una
dad es otro factor gue los seffal de salida, Las espe-
phede afpotse cificaciones que indiean Ia
respuesta del sensor en el
En la figura 1.12, ob- tiempo son el retardo de
servainvy e1 usu del sen= alimeuacivn, el etd
sor capacitivo para detec- la conexién (ON delay) y
tar la presencia de un If cio fa dptce €lTetardo a la desconexiGn
quido, un polvo wotra sus- 207 6: respocivo (OFF delay),
ctividades
2 Curso Préctico de Electrénica Industrial y Automatizacion * CENT
Electrénica Industrial
Fauna 1.14 Mecicis
| retardo a la alimenta-
ci6n previene que falsas sefia-
les generen una condicién de
ON en la carga. La necesidad
de este pariimetra surge del
do a que pueden existir induc-
tancias y capacitancias pardsi-
tas cn ios cables capaces de
originar picos transitorios en al-
‘giin momento de conmutacién.
Estos pueden ser dos 0 tres ve~
ces superiores al voltaje nor-
mal. Puesto que una condicién
de esa naturaleza es inacepta-
ble, la industria ha exigido que
los dispositivos no
cambien su estado
durante la fase de
inicio de alimenta.
cidn, Esa es larazén
por la cual la salida
de lus sensores se
desactiva durante un
period inicial que
puede estar en el
rango entre 30 y 200
ms para todos los ti-
pos de sensores.
ON delay es el
de movimiento Fetardo de respuesta
ese después de que la
uunidad na sido acti
vada, Es el tiempo requerido
para que la interface de disparo
rigine un cambio de estado en
Jasalida cuando un objeto se ha
tre
cidn, OFF delay es el tiempo
requerido por el sensor para ori-
xinuar un cauibiv encl estady de
Ia salida cuando un objeto que
td siendo detectado sale del
rea de deteccién. Los valores
tipicos de este retardo en esta
clase de sensores son de 0.1 a5
ms para salidas DC y de 8 a 20
ms para salidas AC, figura 1.15.
cidevon el érea de deter
objetivo
Salida
Retardo
aeUN
Retardo
eure
1
Antes de entrar a desarro-
Mar cualquier aplicacién, se
deb analizar la respuesta en el
tiempo para garantizar un huten
funcionamiento de cualquier
sistema de adquisicién de datos.
BL ticinpo de respuesta Icy at
ser critico cuando se tienen cuer-
pos a sensar que pasan con du-
raciones muy cercanas al ON
delay 0 al OFF delay del sen-
sor. Siel tiempo observable por
el cuerpo objetivo (To) es me-
nor que el ON delay del sensor,
ste no cambiar’ de estado. Si
‘es mayor que el tiempo ON del
sensor, entonces la medicién se
hara sin problemas,
El tiempo observable es ef
tiempo real que el objetivo puc-
de ser observado por el sensor.
Reto representa el tiempo trans
currido entre la posicién 1 y la
posicién 2 de un ejemplo tip
ko come se ve en la figura
1.16, Para despejar To se pue-
de usar la formula:
To =(a+b)
V
> Ton
Medicién y control de proximidad
Cuando disene su apli
cidn, tenga en cuenta que el
tiempo observable debe ser
ayor que el tiempo de rec
puesta del sensor. Si esto no
es asi, se debe escoger un sen-
Sor mas rapido o inerementar
la duracién del cuerpo objeti-
vo en el drea de deteccién.
Sefializacion y
calibracién del
dispositive
El aparato est equipado con
tres LEDs: uno amarillo (A)
que indica el estado de la sali-
da, uno rojo (B) y uno verde
(C), ambos para el control del
umbral de recepcién, Ellos in-
forman sobre la intensidad del
haz recibido, estableciendo
cuatro niveles tal como se
on la figura 1.17.
EL aparato ampliticador
puede ev
tar su sensibilidad por medio
de dos potenciémetros (PI y
P2); PI es para dar un ajuste
inicial mientras que P2 permi-
te proporcionar un ajuste fino.
ZULAMLSE putt jus
Tornillo de ajuste
de las fibras Pr
Caracteristicas eléciricas del sensor de fibra dptica
‘Tipo de detector.
Limites de tension
aida de vntaje on astada cerrade
‘Capacidad de conmutacion
‘Consumo de corriente sin carga
Frecuencia maxima de conmutacion
etaraos
‘ON delay.
OFF delay...
Alaalimentacién
DG, 3 hilos, tip transistor
“10 30.V DC
21.0
vox 100 MA
<20mA
500 Hz
Sms
ims
‘Caractoristicas eléctricas de los sensores fotosléctricos
Tipo de detector.
mites ae tension.
DC, 8 hilos, tipo transistor
Caida de voltae en estado cerrado
Capacidad de conmutacin ...
‘Consumo de corriente sin caraa ..
Frecuencia maxima de conmutacion
Rotardos
‘On delay
Ort delay «
Tipo de emisién..
La calibracién se hace gi-
rando inicialmente estos dos po-
tencisimetnos hasta
posicién y alineando las fibras
de manera que haya seiial de
salida, Luego, muy despacio, 9
devuelve PI hasta que se des-
active lasalida, y con P2 se bus-
cca el punto exacto donde la sa-
lida vuelve a aparecer. La cali-
braci6n es un proceso necesa-
of off
rio ya que pueden aparecer cit-
cunstancias inesperadas, como
la influencia de humo o brama
en fa transparencia del medioen
‘que esté situado, lo que pertur-
bal funcionamiento pordismi-
nuciGn de la sensibitidad
Los cables marrén y azul
son ta entrada de la alim
‘con, Es cable naranya sirve para
oo
2 +]BN 4.
wie. eb
PNP.
Electrénica Industrial
Figura 1. 19 Aspec
la configuracién del sensor en-
tre dos opciones posibles (ac-
tivacién con luz o activacién
con Sombra). Esto se hace sim-
plemente cambiando la posi
cién del cable, figura 1.18. Es-
tus semsores puseen sali por
transistor. Por eso pueden ser
PNP o NPN.
Sensores
fotoeléctricos
Los sensores fotoeléctricos
utilizan los principios de emi-
peién de lus para
in y ro
detectar la presencia de obje:
tos. El emisor es un disposi-
tivo que emite un naz de luz
(usualmente infrarrojo) cuan-
do se le aplica una corriente
‘a. El receptor es un
dispositive que cambia el es-
tide de si salida enando i
cibe la luz del emisor.
Eu la prcse
empleamos el sensor XUB-
1101353 de ‘Telemecanique.
flector establece la ruta de re:
greso del rayo entre el emisor
yel receptor, figura 1.20. Este
sensor posee tecnologia de
terruptor de estado s6lido, con-
formada por un transistor que,
sewuit la referencia del suse,
puede ser NPN 0 PNP.
En la parte inferior, el sensor
posee su respectivo LED de
senalizacién, el cual se activa
en caso de que haya deteccién
dol rayo infrarrojo, y 08 apaga
cuando un cuerpo obstaculiza
dicha reflexién. Este sensor
posee su potenciometro de ca-
libraci6n, figura 1.21. Para
ajustarlo, se deben seguir los
fiemtes pasos:
UThicar el detector frente al
reflector.
objetivo
figura 1.19, el cual se ajus-
twa la configuraciGn deno-
emo
Receptor] <—————
minada retrorreflectiva,
donde el emisor y el recep-
lor se encuentran en un
mismo encapsulado. Ell re-
1
2.Con el atornillador girar el
potenciGmetro de ajuste
(ubicado en la parte inferior
del censor) en sentido de las
manecillas del reloj hasta su
maxima posici
3.allinear de tl
establezea el rayo de luz. El
LED indicador amarillo ilu-
minara cuando el haz sea
detectado,
4,Usando el potenciémetro, se
reduce la ganancia hasta que
el LED amarillo se apague.
L
ganancia de nuevo, muy des-
pacio, hasta que se encienda
huevamente el LIED.
5.Se ubica el objeto a detectar
enel rayo de luz, verifican-
doque el LED amarillo cam-
bie de estado.
lego se incrementa esta
A modo de practica 0 ex:
perimento, se puede analizar
tar progresivamente objetivos
mas rapidos y pequeiios, ajus-
tando el tiempo de respuesta
y teniendo en cuenta los tiem-
pos de retardo de ON delay y
de OFF delay. Por ejemplo, si
un cuerpo ingresa a la zona de
por un porfodo de
10 segundos y el ON delay se
encuentraen 5 segundos,
Ja Salida del sensor se ac
tivaré $ segundos des-
pués de haber ingresado
el cuerpo.
W el yeusur pucde Uctee=
deteceis
Cuando el cuerpo
sale de esa zona, la salida
cambia de estado sin nin-
gtin retardo. Si cl cuerpo
"1
CERCHT ~ Cursy Practice de Blecurdnica tntustriut y Auconwuticacin ——L1—
Medicién y control de proximidad
entra a la zona de deteccién
solu por 2 segunuos, el unis-
mo no serd tenido en cuenta.
En nuestro caso, vamos a
detectar la presencia del nivel de
un fluid en un revipiente de pa-
redes transparentes, inicialmen-
te vacio, figura 1.22. Ahora se
adiciona agua en cl roeipionts.
Esta accidn ocasiona un agite w
‘oleaje” en a superficie del agua
Idealmente el sensor totoetectri-
‘co requiere de un estado de cal-
ma en la superficie para poder
deteetatla, Como las olas rom-
pen el haz de luz, ta salida del
sensor se prindes an ON yh
en OFF en un intervalo de tiem-
po muy corto, Este cambio brus-
ky puede datiar alydin elententy
conectado al sistema, digamos
na solenoide o un contactor use:
do para controlar el nivel de I
quido, por ejemplo,
En este caso, se puede
usar el ON delay para que no
69 tongan en cuenta las olas
alividades,
generadas v cambie el estado
de la salida s6lo después de
un par de segundos hasta que
paso ol agito. El OFF dolay os
un retardo similar al ON de-
lay. Asf como el ON delay
prolonga 1a condicion de
apagado, el OFF delay pro-
longa la condicién de encen-
dido. La idea del ON delay
es ignorar alguna irregulari-
dad en Ja rata de espacios
entre cuerpos a sensar
Observemos la figura 123,
Supongamos que el sensor po-
see 20 ms de ON delay y hay
1D ms de retardo en tas entra-
das del PLC. La sefial debe ser
dispuesta de tal manera que el
PLC sea capaz.de leerla en cada
ciclo de revisién de puertos, es
docir, que el cambia de la sonal
del sensor sea més lento que la
velocidad del ciclo con que el
PLC la tee mid el retary de
tiempo del filtro de la entrada.
Este tiltimo es necesario en los
ambientes industriales para su-
primir transitorios. En la pi
tica, debe existir un compromi-
so ontro velocidad y proteecién
a transientes,
Durante el perfodo de re-
visiGn de entradas, el PLC se
encarga de leer sus puertos, re-
solver la Igica programada y
actualizar sus salidas. La dura-
i6n de la sefial del sensor debe
ser superior al tiempo de esca-
neo del PLC, més el retardo
debido al filtro de entrada del
PLC. El tiempo total del siste-
ma es la suma de los tiempos
de ON y UFF delay del sensor,
el de retard del filtro de entra-
da y el de lectura del PLC.
Como recomendacién fi-
nal, para detactar cuerpas pe.
quefios o muy répidos, es me-
{jor que intente buscar sensores
‘que puseat éteay Ue se
pequefias. En otras palabras, de
una répida respuesta,
12 ursu Pravin de Btecsrintee Indusctat y Ausomutcuctin = CHEB
Manejo de motores DC
minuir la produccidn de calor _ sistema préctico del control de carga es bajo. Observemos que
porunidad de tiempo. Asimis- un motor PWM. Alli, el pri- para Vo,.,= 4 V se tiene un
mo sies unacarga de luz, pue- mer 555 operacomooscilador, tiempo de encendido de 6 ms
ar on enengta Inminass, eanda ol Namen negative dle en in pertovda dle 25 me Fl ei-
ysiesun motor puede variarla su salida principal para dispa- clo de trabajo es
potencia mecsnica entregada, rar un segundo 555, el cual
‘upcta Commu vincuilu de utt solu
Modulacién por ancho ——disparo variable. Ante esa cates eae
de pulso con 555 fuente de disparo externa, el
Un medio prictico para lograr segundo 555 origina un pulso
la modulacién por ancho de de salida de una duracién de- Asi, se entrega una poten-
pulso consiste en usardos cir- terminada por la ecuacién: ca promedio baja a Ia arma-
cuitos integrados 555, chip dura del motor, por lo que éste
muy popular que hemos estu- tp=1.1xR,C,. crea un par bajo y opera su
diado ampliamente en nuestra: carga mee!
cursos de Electrénica Digital dad baja.
y Electrénica Moderna En lafigura 1.24 se mues-
an las formas de onda para el dia un valor mayur de
En la figura 1.23 vemos PWM. Para un valor bajo de V,,,,.ttmentel ciclo de traba-
eldiagrama esquemiticode un V,,,,. €l ciclo de trabajo de la jo de la carga y la potencia de
Salida principal 'C1
tumseg)
3 30 5 100105 150
““edspar L \ af SE EL
(varia con la 15 i K I | |
Naraclon de a “1
Vecoatg, ?
Ve
10
4
t
Salida principal 1C2
Min)
mseg f46mseg fi ron i Fe
YZ LAV tinseg)
t 75 mo 75 70041250
Php $-t:Phamas ce ore dol it ch eter por PHN
aiidades
M8 cunsw rrdcsivw we Btecurvnice tutuveriat y Automation ~ SOBeET
Electrénica Industrial q
Manejo de motores _y otra parte mévil conocida Control mediante ue.
DC como rotor o inducido. Sufun- modulacién por ancho: oh
Los motores DC son dispositi-cionamiento se explica detalla- de pulso (PWM)
vos usados normalmente para damento on ol Capitulo 10 de Los motores IC grandes son
controlar procesos industr in de Electricidad In- _ controlados mas eficientemen-
les, Analicemos algunos mé- dustrial de este curso. te con tiristores de alta poten-
todos y las caracteristicas tee ola, fas Hus mnuwwics DC
nicas mas importantes que se _—_-Esencialmente, un motor pequefios y medianos de ima
deben tener en cuenta en el DC de escobillas consiste en permunente, son controlados
momento de disefiar un médu- un cilindro denominado ar- més exitosamente con transis-
Io para el manejo de poten- madura con devanados pa- ores de conmutacién conecta-
cia de estos aparatos. En esta ralelos al eje del mismo. Es- _ dos enserie, manejados por mo-
actividad, haremos experi- tos devanados interacttian — dulacién por ancho de pulso.
mentos con un control de ve- con el campo magnético del
locidad PWM mas un inver estator, causando que la ar- La forma de controlar con
sorde giro con puente H. Este madura rote mecdnicamente PWM es utilizando un voltaje
esel primer paso paradesarro- cuando se le aplica voltaje. de control para variar © mo-
Har control de movimiento en En Ia practica, esta armadu- dular el cicto de trabajo 0 an-
estos dispositivos. ra puede constituirse de una cho det pulso que entra a una
serie de bobinas que pueden carga determinada por unidad
Cualquier maquina elée- ser conmutadas a través de — de tiempo. Esta accién varia el
trica, ya sea motor o genera- dos terminales denomina- _voltaje y la potencia promedio
ng tanya nen LP
principio. Todas constan de estan conectadas eléctrica- un elemento calefactor, el
tuna parte fija amada estator_ mente a la armadura PWM puede aumentar 0 dis-
12207 Ay Op
ay af aban bet i
Sn as
Rg Ramaioa| To Resor
5552)
555, |
Taste | lumbra! Descarga
Umbral Sat Our J Hacia
a IC
ut cc aa pus
Contet
[ Tre 1000 te
YConte
oot
we +
Fis
aera oat. F
rig 12s,
casncitn © Curso rracico ae riectronica tmausirat y Ausomauteucton — AT
Proceso automatico de estibado
A.Sensor inductive. Detecta la. __Datectan si debaio de ella existe motor H) en caso de ave se activen
liegada del sistema mévi vertical una caja o elemento y evita que H.Actuador para e! movimiento
indicando que el procesador debe la matriz quede incompleta antes horizontal. Se encarga de hacer
apagar e| motor respectvo (I) yno de que sea levantada, que la matriz que se ha levantado
Sailer ai la sotructura E.gensor fotvcléetriee. Detesta la 20a llevada encima del arrume
B.Sensor fotoeléctrico. Indica si, presencia de cajas al lado de la sobre la estiba.
de acuerdo a la altura del sistema matriz. Sirve pare comprobar que _.Actuador para el movimiento
‘mévil, existen cajas en el arrume. la matriz esté Ire de otras cajas @ vertical. Se encarga de subir y
Cuando el sistema esté ‘os lados vericar asi el buen bajar el sistema movil. Baja,
subiendo, apenas el sensor __funcionamiento del tape que detiene _recoge la matriz de cajas y luego
detecte que no hay cajas en _ la legada de las mismas (), Jas sube para que el actuador (FH)
‘280 pinta rial arrima, al F Sencar rananitive Channel las franenarta an forma
procesador puede detener la _sistema mduil se ubwea encima dela horizontal
subida y empezar a ubicar fa __‘matiiz para levantara, este sensor __J.Tope. Detiene las cajas cuando
matriz de elementos encima. indica al equipo de procesamiento _los sensores capacitvs (D) han
C.Sensur inductive. Delecia que les pices ya estén aprsionando — detectado que a matsiz de
los finales do carrera de! las cajas y que puede procedera _elementos esta completa
sistema mévil horizontal. El evanteras. ‘K.Actuador de agarre. Sirven
procesador debe apagar e! G.Sensores capacitivos. Sivven para aprisionar las cajas.
motor que ejecuta dicho para detectar la presencia de Generaimente son de tipo
movimiento (H). abjetos trente al sistema movil neumético y son varios de este
D.Sensores capacitivos. horizontal. Se deberd detenerel tio alrededor del sistema movil
‘movimiento horizontal
say B Sensor ftoeléctico
Sistema n ‘Senso incucivo
Actuador
de agar
f Estiva
apacinn “OP,
Tope para
oor de movisento vertical
El proceso contrario, es decir, el despaletizado, es muy similar a lo que hemos expuesto en
esta actividad. Solamente se debe aplicar la secuencia en sentido inverso y tener en cuenta
algunos detalles menores.
AS Curso Prictico de
Blectréniea Industral y Automaticacién + CURT
A.sensor o1werecute. Siive
para detectar la caja cuando
llega y queda lista para ser
desviada. Normalmente
conectado a un dispositive de
procesamiento que lleva el
conteo de cajas.
B.Tope quo dotiono ol avance
de las cajas. £1 procesador io
activa en caso de que haya
‘atascamiento en una de las tres
hieras.
.Gulas de encarrilamiento.
Sirven para desviar las cajas
hacia cade una de las hilras.
‘Como en este caso los palets son
de 3x3, cada vez que el sensor
“A” dejo pasar 3 cajas, el
actuador C debe cambiar de carr
para lenar la siguiente fla
D. Sensores inductivos.
Detectan la posicién de las
‘guias metdlicas. Sirven para
{que ol equipo de
procesamiento, que puede ser
se estan dirigiendo las cajas en
ese instante,
1)Si ninguno do los sensores
estd activo, se esta llenando la
hilera central
.2)8i el sensor de fa izquierda
esta activo, se esta llenando la
hilera de la izquierda
.9)Si el sensor de la derecha
‘std activo, se esta llenando la
hilera dela derecha
4)Si los dos sensores estén
activos, hay un problema en
ellos 9 en las guias.
Los sensores capacitivos
*E "estén encargados de detectar
cundo una de las hileras se
ha llenado de cajas. Con esta
seftal, el procesador puede
aptar por cambiar de carrl 9
simplemente por detener el
paso de cajas a través del
actuador del tope “B’
EBUCIT + Curso Practica de Electrénica Industrial y Automatizacién ~
Formacién de la mat
Lamattiz completa se formaen
Ta base de la maquina que la
ayatra y ka ubita sobre ka pil
que se esté formando en ese mo-
‘mento, figura 1.20. Observe que
Ta miiquina esté proxima a reco-
geruna matriz que se esti forman-
do para levarla hacia el lado iz-
quiero donde esta en ese mo-
mento la pila sobre el palet
1
Fn ta figura 14 apes
ciamos la base de dicha
miiquina, la cual agarra las
eajas y las levanta pata Te-
varlas al lugar donde se
encuentra el palet
Veamos los sensores y
actuadores que serian n
cesarios para efectuar esta
labor en forma automatica
Proceso automatico de estibado
elemer
Los elementos por unidades ge-
svete Heyaunat waves Ue unt
banda transportadora 0 de un
transportador de rodilos. Todo
depende del tipo de empaque que
se va aapilar, figura 1.17. Antes
de empezar a formar las hileras.
pexlemos ponerun sensor que in-
dlique el paso de productos por
Ja banda. Este sens
ralmente es 6ptico de reflex
sitve para Hevarlo a un circuito
‘contador de cajas y ademas para
indicar que ya hay elementos
para paltizas @ cal
Para formar ters hileras, 6° pie
de utilizar el esquema que apa
rece en la figura 1.18. Fn la fi-
gura L619 jarleun ajncviat una “Tope que evita el
fotografia de un sistema real paso de ls
Elementos unitarios
Bretecto
En el recuadro de la si
guiente pagina, se describe la
funci6n de cada uno de los sen.
sores y actuadores utilizados. Sonsor
inductivo
Sensor
eapactvo B cspacivo
Curso Prictico de Electronica Industrial y Automatizacion + CEKAT
Electrénica Industrial 4
Proceso de estibado
© paletizado
automatico
Un paler o estiba es un tIpo co-
iin de contenedor utiizado en
Fabricas para agrupar y poder
coger y mover objetos, figura
1.14. Un proceso de estibado es
Ta tarea de cargar sna mate i
de elementos sobre un palet, de
tuna forma tal que puedan ser
almacenados y manipulados de
una manera més compacta y
sencilla, figura 1.15, El Figure 17
proceso contrario, es decit, de
tomaruna matriz de elementos Ia forma en que dichos sen- transporte (banda 0 rodillos), de
ytransformarla en una secuen- sores son elegidos y apl la produccién, ete. Por esto, es
cia unitaria de los mismos, se dos al sistema. necesario elaborar varias filas de
denomina despaletizado. tal forma que los elementos que-
Eequema general dal den seguidos. Una vez forma-
sistema das las filas o hileras, se pro-
En la figura 1.16, podemos cedeajuntarlas para formar asi
aprectarel proceso general de una matriz. de varias filae por
apilamiento sobre un palet, Variascolumnas, 0 sea una ma-
Observe que en la entrada, los _ triz de dos dimensiones.
Paginas elementos unitarios, es decir
sia las cajas, arriban en fila des- Varias matrices de dos di-
Rete ecun proceso en el deeliiltimo paso de empaque —mensiones se montan una en-
cual intervienen gran canti- al proceso de estibado. A pe- cima de otra para formar asf el
dad de sensores de proximi- sar de que Hegan en fila, nor- paquete que se ubicard sobre la
dad, posicién y de movi- malmente Tegan separados — estiba Fn nuestro ejemplo, api-
miento. Por esta razén, es unos de otros ya que depen- _laremos matrices de 3 filas por
importante conocerlo y ver den del estado de] medio de 3 columnas y 7 de altura.
yo
Elementos Foimacion de
unitarios Formacién de fla la maiz XY
Figura a
EEIKET + Curso Prictico de Electrénica Industrial y Automatizacion ——**
Electronica Industrial 1
3
ABCD. Funcion [
10 0 1 | Hacia adelante A + 8
0110 | Haciaairas /
F788] Peat Wotne datenidey al
1040 | Nolo haga : {
o 10-1] Novonaga Motor \
A
Figura 1.25, Esquem sIdel@ r
nfiguiracian e t
‘ eno
cargapromedio. Con V,,,=8V, _ mecénicos, se debe recurrira De esta manera, tenemos un
el ip del circuito de un solo un puente H. Este es un dis-_ mecanismo de break o de de-
disparo aumenta a 1d ms, positive electronico que per-_ tencion del motor.
dando un ciclo de trabajo del mite manejar un motor DC
60%. Esto opera el devanado para inveritir la polaridad au- A laconfiguracién anteror
de carga con mayor fuerza, tomdticamente. Adicional- se le deben adicionar diodos
creando mas par y girando a mente, debe permitir la entra- para que ellos reciban el vol-
una velocidad mayor. da de PWM para que al mo taje inverso generada en las
vimiento del motor sea més bobinas del motor en el mo-
lento o més rapido al variar mento en que la alimentacién
Un valor maximo de V,
conte
de 10V, genera la maxima — el ciclo de wabyjo. © commutada entre ences
potencia de carga prome- do y apagado. Este voltaje
dio. El ciclo de trabajo es Analicemos el esquema puede ser varias veces mayor
=88%. bisico de un puente H, fi- al voltaje de alimentacién. Si
gura 1.25. Si activamos el no se usan estos diodos, el
inversién de giro con transistor A y el transistor — cireuito se dafara.
puente H D, y la alimentacién de 12
Si tomamos una fuente de V esta activa, el motor gi Los transi
alimentacién y concetamos raré cn un sentido, Ahora res son dinp
el terminal positivo con uno _ bien, si activamos los tran- _ calientan facilmente y cuan-
de los bornes del motor y el _sistores B y C, el motor gi- do se necesita mucha poten-
terminal negativo con el otro, rara en el otro sentido, Se cia, estos no son muy ett
el motor girard en un senti- debe tener mucho cuidado cientes. Los transistores
do. Ahora, si se invierten las en no activar los dos tran- MOSFET son mejores para
conexiones, éste girard en el _sistores de cualquiera de los esta funcién y pueden mane-
otro sentido. Cuando se ne- lados pues habré un corto jar mas corriente sin calen-
I dafiard el tarce Normalmente ya vie~
igual a 22 ms/25 ms
ores bipola-
tives que ae
cesita desarrallar un sistema cireuita, la on
para controlar el sentido de dispositivo. Ademis, si se nen con los diodos de pro-
giro del motor en cualquier activan los transistores Ay teccién en su interior para
divecion y
usar ielevus By cl mutur uv se miuverd. — prutejcilu de vollajes inver-
SCAT ~ Cursw Pricview de Bteverdnteu tndusertat y Auvmurtaucivin < 12
sos. Para usar MOSFETs en
un puente H, se necesitan
dos de canal P en la parte de
arriba dol puente, que actiian
como fuentes de potencia, y
dos de canal N en la parte
de abajo, que acttan como
sumideros de potencia,
Existen en el mercado
puentes H encapsulados den-
tro de chips. El L298. por
ejemplo, tiene dos puentes H
en su interior y puede mane-
jar hasta 1 amperio con picos
hasta de 3A. El LMD18200,
por su parte, tiene un puente
Hy puede maneyar 20 3 am-
perios, con picos de hasta 6
amperios.
En la figura 1.26 vemos
el diagrama esquemitica de
un puente H, con MOSFETs
de potencia totalmente pro-
Lady. Muchus proyecis, tae
sv
Manejo de motores DC
les como los de robstica, re-
quieren de una tarjeta con
troladora que pueda manejar
més de 3 amperios de poten
cia para manejar sus moto-
res, los que en muchos casos
pueden Hegar a exigir nasta
15 amperios,
Elcircuito permite la entra-
da de PWM y las dos entradas
de control con las que se confi-
gura el sentido del movimiento
segtin la tabla 1. EIPWM y cada
una de las entradas de configu-
naunareglocon
‘compuertas NAND de colector
‘abierto, que se encargan de ga-
rantizar que no se produzean
cortos en el circuito,
Para hacer control de un
‘motor, slo basta insertar un mi
crocontrolador que envie el vol-
taje de control y las sefiales de
configuracion det puemte
Actividades con
motores paso a
paso (PAP)
Los motores paco a paso
son ampliamente utilizados
en proyectos de robética,
maquinas de impresion y
discos duros, entre otros.
Conozcamos su estructura,
funcionamiento y la forma
de controlarlos.
Los motores paso a paso
son esencialmente motores
DC que tienen una estructu-
ra especial. Ellos permiten
construir sistemas muy pre-
cisos de control de movi-
miento y posicién, por lo
que son ampliamente utili-
zados en muchas aplicacio-
nes, Un motor PAP es un
dispositive que convierte
pulsos eléctricos en moyi-
mientos discretos (por pa-
soy) de rovacion mecantca
D1- Da: FRGOT
ctividades
let, 102: 7498
20 curso rracuco de etecrramtca mausirat y Auomanzacwn* Cxeacie
CCualquiera que sea su apa-
riencia externa, el motor tiene
internamente una serie de bobi
nas que en conjunto forman el
stator. Fl rotor esté compuesto
por un material cerdmico que
tiene propiedtades: magnéticas.
con numerosos polos norte y sur
altemados. Estos motores pue-
den tener varias bobinas unifor
‘memente distribuidas y son muy
utilizados en aplicaciones de r0-
botiea, figura 1.27
Los motores de cuatro bo-
binas requieren fuentes de ali-
mentacién simples, con una sola
polaridad. Aquellos motores
que tienen dos bobinas deben
alimentarse con fuentes bipola-
res, y cumforiial ui eincuity en.
puente H para controlar la ali-
mentacin de las mismas. Es
tos motores siempre tendran cit-
{tos mis complejos que aque-
lios de cuatro o mas bobinas,
El movimiento de los mo:
tores se eonsigue alimentando
de manera secuencial las bobi-
nas y de acuerdo al orden en que
esta labor se ejecule, el giro del
CENA + Curso Practica de ktectromea Inaustrial y Automat
motor se hard hacia uno u otro
lado, Si se varfa el tiempo de
duracién de cada paso de la se-
cuencia se consigue el control
de la velocidad del motor:
Una manera fécil de identi:
rel ndimero de bobinas de un
motor paso a paso es contando
cl nmero de sus terminales. $i
tiene tinicamente cuatro cables,
es muy probable que el motor
sea de dos bobinas; si, en cam-
bio tienen 5, 6u 8 cables, puede
ser que el motor sea de cuatro
bobinas. Cuando se tienen 5 c-
bles, normalmente uno de ellos
es comin 2 las cuatro bobinas
Cuando se tienen 6 cables, se-
guramente el par de bobinas de
Cala Lupa lice un elemento
comin, y cuando se tienen 8,
bles, lo més probable es que las
cuatro bobinas no tienen ele-
mentos comunes dentro de ke
tructura del motor.
Identificacin del terminal
comin, Para identificar los
elementos comunes en un
potor, algunas veces se acu
ae al color de cada uno de
los cables: el negro, por lo
regular, indica cl elemento
comtin. Otra forma de iden-
tificarlo es por medio de la
medicin de resistencia: el
terminal comiin siempre ten-
dra un valor més bajo con
Tespecto a los demas.
Oporacién con dos
polaridades
Los motores PAP de dos bobi
nas necesitan allmentacion ue
potencia de polaridad positiva
y negativa, El flujo en el esta:
ior de un motor de este tipo,
figura 1.28, se invierte cuan-
do se invierte tambit
rriente a través de la bobina.
El circuito de potencia que ali-
menta las bobinas debe estar
compuesto por un puente de
interruptores que permitan
aplicar las dos polaridades.
Este puente puede estar cons-
tituido por un arreglo de cua-
tro transistores cuyo funciona-
miento se explica a continua:
ciém. Cuando Ql y Qa
cen se tiene polaridad posit
vaen la bobina y siQ2 y Q3 lo
hacen, ka polatidad sea uegar
on 21
Actividades con motores paso a paso
Figura 1.28. Configuracién bipolar de un moter PAP
tiva, En las tablas 1.2 y 1.3
se muestra la secuencia de
conmutacién de las bobinas
que so debe ceguir para abte-
ner el movimiento del motor
en ambos sentidos.
Operacién con una
sola polaridad
Muchos motores de este tipo
que se consiguen comercial-
mente. poscen externamente
ocho terminales y cuatro bobi
nas independientes. En la figu=
ra 1.29 se muestra la forma en
que se deben conectar para con-
seguir la rotacién, Allf se pue~
de apreciar que uno de 10s ter-
‘minales de cada bobina se esta
conectando a un punto comin,
que por lo regular es el posit
vo de la fuente de alimentacién,
Feta conevidn nos sngiere Las
dems, cuando el motor tiene
entre 5 y 8 terminales .
Observe en la conexién an-
terior que los terminales prove-
mientes de una misma seccién es-
ctvidadeg
ténalternados, Esta conexi6n tie-
nealgunas ventajas yaque no so-
Jamente facilitaelalambrado del
cirouite de conten, sina tambign
Ja realizacién del programa en
microcontroladores y micropro
‘eesadlutes. Con simples sui
ciones de rotacién, hacia uno u
otro lado, se conseguir hacer
girar adecuadamente el motor.
Pasos Q1-04 02.03 05.08 06.07
ON” OFF ON. OFF
ON OFF OFF ON
Se SN Sr Bt
ON OFF ON OFF
Tabla 1.2, Movimiento on el sentido
Pesos 01-04 02.08 05.08 26.07
4 ON. OFF OFF OFF
ore on See Ste
OFF OFF ON OFF
ON OFF OFF OFF
3
2
5
Para lograr el giro del
motor se debe tener en cuen-
ta que hay dos tipos de se-
cuencias de pulsos para los
motores paso a paso, segtin
la velocidad de la secuen-
cia y la carga aplicada al
je: el denominado manejo
por ola (wave drive), don-
de solamente una de las
bobinas se encuentra ener-
gizada en un momento
dado, y el manejo de dos
Figura 1.29. 0%
bobinas. Ce
N82 Curso Préctico de Electrénica Industrial y Automatizacién * CEWAT
Elcetrénica Industrial 4
Pasos Qt a2 a3 4 Oy
Tl ge Sl ge
i
, SL SF Be By od F1 m1
fases (two-phase drive),en don-
de se energizan al tiempo dos
de las bobinas para lograr el mo- Tos tases
Vimiento, En la tabla 1.4 se ob-
serva la secuencia de conmuta- a
cién de las bobinas en el motor
de configuracién unipolar. Angulo de cada paso en el caté- bor, pero su desventajaes la poca
Joga dal mator De le contra. comiante que puielon mannjar
Obviamente, con este tilti- rio, se corre el riesgo de tener
mo tipo se consigue un mayor un comportamiento completa- En esta oportunidad se ha
worgue, aumgucdenanla mayer incite inestable del nisin, desanullaivun circuit semilla,
energia. Si se activa con una se~ cuyo diagrama esquemitico se
cuencia fenta, ef motor deja no- La figura 1.30 muestra muestra en la figura 1.31, en cl
tar el reposo al final de cada ambas formas de onda para el cual se utilizan transistores para
paso. En lasaplicaciones queno control de giro de un motor — controlar un motor paso a paso
requieren una respuesta rapida paso a paso. Alli se debe tener dedos bobinas. Tambign se pue~
y las distancias son cortas, esta presente que si las secuencias den usardrivers ULN 2803 para
operacién es la mas simple. Si se proporcionan en orden in- _reemplazar dichos transistores.
la velocidad dela secuencia au verso, el motor girardien sen- Alli,lassefales de control dedis-
menta, el movimiento cambia tido contrario. paro de las bobinas provienen de
de pasos discretos a movimi tn circuito formado por un con-
vocominnuy comoel de cualyuier ‘Vale ta pena destucar el tador decadal 4017, e1 cus, al
motor: En este caso, loquereal- hecho que no existe una Gni- _aplicdrsele una serie de pulsosen
mente ocurrees queelmotorno ca manera de manejar los — unodesuspines conmutaen for-
alcanza cl reposo entre pasos ¥ motores paso a paso, pues se ma secuencial el estado de sus
porlotantoel controlenvianue- pueden disefiar un gran mi- diez salidas (0 a 9). Los pulsos
vas 6rdenes de conmutacién ha- mera de ci ites que posean — de entrada al contador son origi-
cia el motor cuando atin éste configuraciones diferentes, y _nados por un 555 configurado
presenta cierta velocidad, Para que posiblemente cumplen Ia como reloj. El cire
cvitar este tipo de inconvenicn misma funcidn Fitando seeuene
tes, se debe seleccionar la velo- de un codificador hecho con dio-
cidad de la secuencia segiin las Existen citcuitos integra- dos ripidos IN4148, los cuales
especrticaciones Ge cantidad ¥ dosespecializados paraestala- estan dispuestos de acuerdo a la
ASK + Curso Practice de Electronica Industrial y Automatizacton ~—23_
Actividades con motores paso a paso
ee
100K
cc gly 1 SuoScoSeoas
18h oo,
out-of
our eal
KS pesr vee] SA7 ot
ae cat “4 thetad oqualeni)
ose Aa
a wee
8 14
1S [pe x ourefioall
our
[o_o [] See sno Sao ba
c2 qeslacs lono__ ASTER Stk Six Se Sik
oor, Poor
AST RESET
Bia, DESCANGA
TRIG: BISPARO
TRH: UMBRAL
CNT CONTROL
Sur Satna
VGC: ALIMENTACION
GND: TERRA
secuencia requerida por el mo-
tor para que se mueva en cada
direcci6n, tal como se muestra
en la tabla 1.2.
(Cuando se diseita un siste~
site LOW MULHES pasu @ pas”,
se deben feneren cuenta varios
factores antes de hacer la elec
cidn del mas adecuado, tales
como el angulo del paso, la
vida titi el didmetro y la capa
cidad de torque. Para este titi-
mo, €s conveniente caleular el
Lorque maximo demandado por
laaplicacién y compararlo con
las especificaciones dadas en
las hojas de datos del motor.
alividades.
aa
Todos los sistemas mecd-
nigos manifiestan cierto gra-
do de friccion. El motor selec-
cionada debe tener in torque
suficiente para superar la fric~
cin que se presente y propor-
para contrarestar la inercia de
lacarga. Porlo general, las tra-
yectorias se ilustran como per
files trapezoidales, figura 1.32.
Para llegar desde el reposo a
un punto cualquiera, el motor
debe inicialmente tener un
tiempo de aceleracién, un
tiempo donde permanece con
una velocidad constante y fi
nalmente un perfodo de des-
lat sufivicnte avclerac
aceleraci6n hasta llegar esta-
blemente a su objetivo final. EL
torque demandado se ubiea en
el primer tramo de la trayecto-
ria o tamo de aceleracién, y
consiste de varias partes, entre
cllas el torque de aceleracién,
torque debido a la friccién y
torque debido a la gravedad.
‘vives
Eten meee
guia 1.32. Port
Curso Practico de Electronica Industrial y Automatizacion * Case
Control automatico de bandas transportadoras
Lavado
—> ysecado
Figura 1.43 Una panai
transporte automatico es de
‘gran ayuda para la ejecucion de
diferentes procesos, figura
1.43. Por ejemplo, puede llevar
Jos envases consecutivamente
diferentes secciones, como el
Iavado, secala, etiqnetacla, Ne
nado, tapado y empaque.
B
cién y pesaje. Cuando el silo
© la tolva de almacenamiento
de producto queda retirada de
la bascula o del sitio de empa-
ve, una banda transportado-
ra es una solucién éptima, ya
» sistema de do:
Compuerta’
Figura 1.44.
ctvidades
YEGa's
—> Lsnade
Puesta
que permite el transporte de
una manera segura y confia-
ble. Por ejemplo, para el pe-
sje de producto, en ocasiones
suele utilizarse una banda con-
trolada directamente por la
hasenla. si deta es antomati
figura 1.44.
Ba un sistema de enade de
envases. Este proceso es simi-
lar al de embotellado, Cuando
el material a empacar es liqui-
do, através de una banda trans-
portadora controlada adecua-
damente se puede efectu:
TTolva eon
producto
— ce tapas — de las etiquetas
Puesta Hacia el empaque
en las cajas
proceso de Henado tal como
muestra la figura 145, La
banda debe disminuir su ve-
locidad suavemente para no
derramar el contenido de los
dems envases y detenerse
mientras se lena uno nieve.
luego debe arranear y posicio-
nar el siguiente envase deba-
ju de la bomba que sum:
tra el producto.
En un sistema de transporte
de producto. Fstaes quizds la
aplicacién més basica; sin
embargo, requiere de una se-
Controlador
Tolva
bascula
Curso Préctico de Electronica Industrial y Auomatizacién © CEKOT
Electrénica Industrial
Control automatic
de bandas
transportadoras
nn esta actividad conoceremos
algunos sistemas de transpor-
te de producto y de materias
primas a través de bandas
transportadoras. Este sistema
do transporte palo ser ienple
mentado con la sencillez 0
complejidad que la planta y el
proceso lo requieran.
Es bueno tener en cuenta
que, aunque aqui mostramos
diversas arquitecturas de pro-
ceso. todo sistema automitico
tiene sus pardmetros y requi-
sitos Unicos de disefio, moti-
vo por el
mente la cantidad y disposi-
cidn de sensores, actuadores y
controladores de determinado
proceso, tiene que ajustarse a
os esquemas expuestos aqui.
J, no necosaria
No obstunte, dichos es-
quem
del funcionamiento del siste-
ma y pueden utilizarse como
ayuda en el momento de ha-
cer un mantenimiento, ya sea
preventivo 0 correctivo, o por
que no, un diserio de un siste~
ma de transport.
‘as dan una idea global
Las bandas transportado-
ras son ampliamente utilizadas
para Hevar el producto a de.
terminadas partes de un pro-
ceso dentro de un sistema de
produccidn en serie. Para que
puedan moverse, normalmen-
te utilizan un motor wiffsico
cen uno de sus extremos y ro-
dillos giratorios en el otro yen
puntos intermedios, figura
LAL, La velocidad del motor
puede regularse a través de un
variador de velocidad. En el
caso de un motor trifésico, lo
que hace el variador es cam-
biar la frecuencia del voltaje
que 60 lo suministra,
Cuando el producto que se
desea transponar debe pasitt Ue
una banda a otra, debe existir
un sistema de control que si
cronice la velocidad de ambos
motores. De lo contrario, espe-
cialmente si la velocidad de la
segunda banda es menor, se
produciran atascamientos y el
desborde del material que se
esté transportando, Esto ¢s algo
muy grave tratindose de ele-
mentos fragiles 0 delicados.
Si el material a transpo
tar no es completamente soli
do, por ejemplo azticar, café y
granos en general, 1a banda
debe tener inclinaciones hacia
el centro para evitar que el pro
ducto se derrame. Esto se lo-
era instalando dos hileras de
las quia traten siempre de
evar el material hacia el cen-
tro de la bands, figura 1.42.
Aplicaciones
Aunque son innumerables los
tusos que se.le pueden dara una
banda transportadora, @ conti-
nuacién examinaremos algunas
aplicaciones que pueden tener
dentro de una planta industrial
Enuna embotelladora de cer-
veza o gaseosa. Fn una planta
embotelladora, una banda ue
EEKET + Curso Prictico de Electrinica Industrial y Automatizacin 22
Actividades con motores AC
cas especiticas y entre las ve
tajas que ofrecen se tiene que
ellos permiten que un usuario
pueda realizar control sobre el
motor simplemente con u
fal entre 0 y 10 voltios, o entre
4y20mA. Adicionalmente, po-
seen dos pines con fos cuales Se
configura el sentido de giro de-
seado. Como precaucién, es
bueno proteger estos dos pines
mediante algtindispositivo, por
ejemplo. un relé. con el cual se
garantice mecdnicamente que
Jos dos pines no estarain habili-
tudos al mismo tiempo. De esta
1. Ajuste de la corriente de dieparo
2. Botén de stop
3: Bot6n de reinicio
48. Contactos auxiiares
6. Bornes de salida
7 Ramee da entrada
aiividades
elo} ae
Control BOTT, po, 2} is Fr
Control por| corriente_|4~20mAl
ioe
serge OE Thos [
$3] LO-
‘manera, con un solo bit origi-
nado en el dispositivo de con-
trol, ya sca una computadora
tun microcontrolador, se e pu
da decir al aparato on qué di
reccidn debe girar.
Al rabajar con vartadores se
puede tener la tranquilidad de po-
der hacer varios ensayos, tales
como aceionar el motor a plena
potencia, cambiar inesperad
mente el sentido de giro. parar
ripidamente, etc. La confiabil
dad que nos brinda un variador
etal que lo inieo que debe ocu
Relés térmicos
Son elementos de proteccién
contra sobrecargas. Su princi-
pio de funcionamiento se basa
en la deformacién de ciertos
elementos (bimetales) cuando
alcanzan determinado nivel de
temperatura. Este efecto se
‘aprovecha para accionar unos
contactos auxiliares aue des-
‘energizan todo el circuito y ac-
tivan un dispositivo de sefiali-
zacién. En la figura vemos el
térmico LR2D 1314 de Teleme-
canique, el cual pose en la
parte superior una perilla don-
parnuestro tiempo esl desaro-
Mode un buen algoritmo de con-
trol. Los variadores, por lo ge-
setie de ments
configurablos por teelado, don:
de se les puede ajustar algunas
caracteristicas del motor que se
Vaaamanefar, Paraesto puede ser
muy til la informacién conte:
nida en la ficha de identificacién
de-cada motor. Un esquema tipi-
co det desarrollo de un sistema
de control con un variador se
muestra en la figura 1.40.
Estos dispositives nor
malmente vienen protegidos
contra sobre voltajes en la se-
nal de control del usuario.
Sin embargo, se debe tener
precaucién de no hacer cor-
to circuitos en ninguna parte
del aparato, sobre todo en las
Iinene de alimentacidn, pies
se puede afectar fisicamente
al variador:
de se le puede ajustar la co-
rriente limite para producir el
disparo, un botén de reinicio
con el cual los contactos vuel-
ven a su estado original y uno
de detencidn del sistema.
28) cunco Prictico do Eloctrinica Industrial y Automaticacin « muah
También podría gustarte
- Analisis de Fallas CoronasDocumento46 páginasAnalisis de Fallas CoronasJ.ENRIQUEZ.B90% (21)
- Pemex Tuberia Plastica ReforzadaDocumento26 páginasPemex Tuberia Plastica ReforzadaFRBM2100% (2)
- Probabilidad y Estadistica Elementales PDFDocumento184 páginasProbabilidad y Estadistica Elementales PDFCristhAdams100% (1)
- El Hombre y Los MaterialesDocumento22 páginasEl Hombre y Los MaterialesFRBM2Aún no hay calificaciones
- IndiceDocumento10 páginasIndiceFRBM2Aún no hay calificaciones
- El Hombre y Los MaterialesDocumento22 páginasEl Hombre y Los MaterialesFRBM2Aún no hay calificaciones
- Capitulo 5Documento17 páginasCapitulo 5FRBM2Aún no hay calificaciones
- Manual EpanetDocumento206 páginasManual EpanetJose Alberto100% (1)
- El Hombre y Los MaterialesDocumento22 páginasEl Hombre y Los MaterialesFRBM2Aún no hay calificaciones
- Fractura Ductil y FragilDocumento11 páginasFractura Ductil y FragilMax Alberto Flores FrancinoAún no hay calificaciones
- Manual Estadistica PDFDocumento91 páginasManual Estadistica PDFCeies Salud HnymAún no hay calificaciones
- Identificación de las zonas de inicio, progresión y rotura final en una superficie de fractura de cigüeñalDocumento8 páginasIdentificación de las zonas de inicio, progresión y rotura final en una superficie de fractura de cigüeñalFRBM2Aún no hay calificaciones
- Capitulo 4Documento23 páginasCapitulo 4FRBM2Aún no hay calificaciones
- Identificación de las zonas de inicio, progresión y rotura final en una superficie de fractura de cigüeñalDocumento8 páginasIdentificación de las zonas de inicio, progresión y rotura final en una superficie de fractura de cigüeñalFRBM2Aún no hay calificaciones
- SW Manual PDFDocumento20 páginasSW Manual PDFalexingmAún no hay calificaciones
- 3412 - GGW - 35050-06 (2013)Documento18 páginas3412 - GGW - 35050-06 (2013)Jesus100% (1)
- Emulatori Spa 1 ActualizadoDocumento80 páginasEmulatori Spa 1 ActualizadoFRBM2Aún no hay calificaciones
- PR 1825 - V06-12 - 3516 - Pgdi - 182550P01Documento10 páginasPR 1825 - V06-12 - 3516 - Pgdi - 182550P01juanvillalobos2022Aún no hay calificaciones
- Pintura ColoresDocumento2 páginasPintura ColoresFRBM2Aún no hay calificaciones
- Taller Teorico Practico en El Manejo de EmergenciasDocumento44 páginasTaller Teorico Practico en El Manejo de EmergenciasFRBM2Aún no hay calificaciones
- Capitulo 2Documento8 páginasCapitulo 2FRBM2Aún no hay calificaciones
- Capitulo3 PDFDocumento54 páginasCapitulo3 PDFFRBM2Aún no hay calificaciones
- Capitulo 1Documento22 páginasCapitulo 1FRBM2Aún no hay calificaciones
- Pintura Epoxi Poliamida GrisDocumento2 páginasPintura Epoxi Poliamida GrisFRBM2Aún no hay calificaciones
- PFR IngeoambienteDocumento4 páginasPFR IngeoambienteFRBM2Aún no hay calificaciones
- Ficha Tecnica Liquido Refrigerante Truck CoolantDocumento4 páginasFicha Tecnica Liquido Refrigerante Truck CoolantFRBM2Aún no hay calificaciones
- Panorama IdecoDocumento5 páginasPanorama IdecoFRBM2Aún no hay calificaciones
- Ep CuaoDocumento47 páginasEp CuaoFRBM2Aún no hay calificaciones
- Exámenes Médicos OcupacionalesDocumento27 páginasExámenes Médicos OcupacionalesFRBM2Aún no hay calificaciones
- FluorosisDocumento10 páginasFluorosisFRBM2Aún no hay calificaciones