También podría gustarte
- Practica 2 Acustica y Optica Fi UnamDocumento6 páginasPractica 2 Acustica y Optica Fi UnamBer R100% (1)
- Practica 5 MicrontroladoresDocumento5 páginasPractica 5 MicrontroladoresBer RAún no hay calificaciones
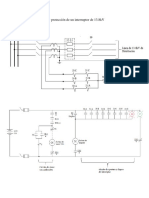
- Esquema de Control y Protección de Un Interruptor de 13.8kVDocumento1 páginaEsquema de Control y Protección de Un Interruptor de 13.8kVBer RAún no hay calificaciones
- Pregunta 3,5 Practica 8Documento1 páginaPregunta 3,5 Practica 8Ber RAún no hay calificaciones
- Practica 1 Acustica y ÓpticaDocumento14 páginasPractica 1 Acustica y ÓpticaBer RAún no hay calificaciones
- Practica 1 Prin TermoDocumento3 páginasPractica 1 Prin TermoBer RAún no hay calificaciones
- Practica 10 Pregunta 7,8Documento1 páginaPractica 10 Pregunta 7,8Ber RAún no hay calificaciones
- Instrumentos de MedicionDocumento3 páginasInstrumentos de MedicionBer RAún no hay calificaciones
- Graficas Notas MusicalesDocumento4 páginasGraficas Notas MusicalesBer RAún no hay calificaciones
- Practica 7 Pregunta 6, 1Documento2 páginasPractica 7 Pregunta 6, 1Ber RAún no hay calificaciones
- Graficas Notas MusicalesDocumento4 páginasGraficas Notas MusicalesBer RAún no hay calificaciones
- Eliminacion Gaussiana en CDocumento4 páginasEliminacion Gaussiana en CBer RAún no hay calificaciones
- Tarea1 Radiacion Fisica de SemiconductoresDocumento6 páginasTarea1 Radiacion Fisica de SemiconductoresBer R100% (2)
- Graficas Suma de SeñalesDocumento2 páginasGraficas Suma de SeñalesBer RAún no hay calificaciones
- Tarea2-Efectofotoelc Rivero Diaz BernardoDocumento9 páginasTarea2-Efectofotoelc Rivero Diaz BernardoBer RAún no hay calificaciones
- Practica 6 Momento de InerciaDocumento4 páginasPractica 6 Momento de InerciaBer RAún no hay calificaciones
- Practica 5 y 6 Computacion para IngenierosDocumento12 páginasPractica 5 y 6 Computacion para IngenierosBer RAún no hay calificaciones