También podría gustarte
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- 12V 100ah Battery Charger Circuit - DIY Electronics ProjectsDocumento14 páginas12V 100ah Battery Charger Circuit - DIY Electronics ProjectsSudip MondalAún no hay calificaciones
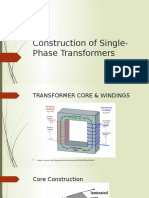
- Construction and Types of Single-Phase TransformersDocumento27 páginasConstruction and Types of Single-Phase TransformersRaja VidyaAún no hay calificaciones
- 231208-1002060259 SWCH, S2928EF-DC, 16 GE SFP ports,,BDCOMDocumento1 página231208-1002060259 SWCH, S2928EF-DC, 16 GE SFP ports,,BDCOMM AidilAún no hay calificaciones
- Power Electronics Design and Development - Dr. Ali Emadi's Research Group at McMaster University - Canada Excellence Research Chair (CERC) in Hybrid PowertrainDocumento2 páginasPower Electronics Design and Development - Dr. Ali Emadi's Research Group at McMaster University - Canada Excellence Research Chair (CERC) in Hybrid PowertrainYugendra RAún no hay calificaciones
- Schottky DiodeDocumento3 páginasSchottky Diodeبنیاد پرستAún no hay calificaciones
- Yeskawa Mom2Documento1 páginaYeskawa Mom2ahsan ullahAún no hay calificaciones
- Power Electronics: From Wildi Textbook, 6eDocumento29 páginasPower Electronics: From Wildi Textbook, 6eSritaran BalakrishnanAún no hay calificaciones
- Industrial MCQsDocumento16 páginasIndustrial MCQsHarith Nawfel0% (1)
- Circuit Diagram of Smps Power Supply Is An Electronic CircuitDocumento10 páginasCircuit Diagram of Smps Power Supply Is An Electronic CircuitohhooAún no hay calificaciones
- Power Diodes TutorialDocumento3 páginasPower Diodes TutorialAvinesh ChandAún no hay calificaciones
- Full Text 01Documento272 páginasFull Text 01yahoo1231qAún no hay calificaciones
- Max8903 Max8903yDocumento30 páginasMax8903 Max8903y123Aún no hay calificaciones
- 8049Documento239 páginas8049adnantanAún no hay calificaciones
- Vol. 1 - PG.1Documento175 páginasVol. 1 - PG.1yadavsticky5108Aún no hay calificaciones
- Secrets On Power Supply Repair and Troubleshooting2Documento3 páginasSecrets On Power Supply Repair and Troubleshooting2Gendil FatheAún no hay calificaciones
- Diode Test PDFDocumento2 páginasDiode Test PDFronald allan liviocoAún no hay calificaciones
- Unit 2Documento19 páginasUnit 2Dr C.R. BalamuruganAún no hay calificaciones
- Training Report 2Documento33 páginasTraining Report 2Nishant BahugunaAún no hay calificaciones
- AariefSyed-Khaja Disseration OPUSDocumento249 páginasAariefSyed-Khaja Disseration OPUSMisikEEAún no hay calificaciones
- PX4212 2Documento3 páginasPX4212 2kalpanaAún no hay calificaciones
- Full Bridge Phase Shift ConverterDocumento21 páginasFull Bridge Phase Shift ConverterMukul ChoudhuryAún no hay calificaciones
- List of Substations: SR No District Sub - Div Ss - Name Substatio N Code Installed - Capacity Spare Capcity in MWDocumento47 páginasList of Substations: SR No District Sub - Div Ss - Name Substatio N Code Installed - Capacity Spare Capcity in MWSudhir ShindeAún no hay calificaciones
- Ece-Ie4 Lec01 - PNPNDocumento72 páginasEce-Ie4 Lec01 - PNPNMENDOZA JUDY ANNAún no hay calificaciones
- Power Electronics: Poly Phase Uncontrolled RectifiersDocumento15 páginasPower Electronics: Poly Phase Uncontrolled RectifiersAnonymous 78iAn6100% (1)
- Brochure of RASETM-2021-10Documento8 páginasBrochure of RASETM-2021-10Harshita MittalAún no hay calificaciones
- Test Results For Songea 5mva TransformerDocumento6 páginasTest Results For Songea 5mva TransformerNuru TwahaAún no hay calificaciones
- DatasheetDocumento1 páginaDatasheetbyzuluAún no hay calificaciones
- Scientech 2708Documento40 páginasScientech 2708sarikapravinAún no hay calificaciones
- Outdoor Telecom Power Cabinet SystemsDocumento21 páginasOutdoor Telecom Power Cabinet SystemsFanica Colbea0% (1)
- Opm 40 KvaDocumento103 páginasOpm 40 Kvarajabharath12Aún no hay calificaciones