También podría gustarte
- 2000BY-E-60165 Rev 0Documento1 página2000BY-E-60165 Rev 0Kenny Jiménez RuizAún no hay calificaciones
- Compraleapiura 17abr2020Documento39 páginasCompraleapiura 17abr2020Katheryn Mirella Moran NoleAún no hay calificaciones
- Flujo de Proceso de Secado y Puerto-2015Documento2 páginasFlujo de Proceso de Secado y Puerto-2015Kenny Jiménez RuizAún no hay calificaciones
- 26.09.19 Observaciones Planeadas de Trabajo (Opt)Documento1 página26.09.19 Observaciones Planeadas de Trabajo (Opt)Kenny Jiménez RuizAún no hay calificaciones
- Simulación y juegos empresarialesDocumento8 páginasSimulación y juegos empresarialesKenny Jiménez RuizAún no hay calificaciones
- Mapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Documento1 páginaMapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Kenny Jiménez RuizAún no hay calificaciones
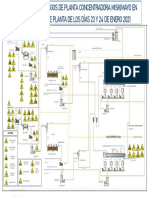
- Mapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Documento1 páginaMapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Kenny Jiménez RuizAún no hay calificaciones
- Conceptos y Estilos de Liderazgo RecopilaciónDocumento34 páginasConceptos y Estilos de Liderazgo Recopilaciónshizo slan100% (1)
- Situaccion de SaludDocumento12 páginasSituaccion de SaludKenny Jiménez RuizAún no hay calificaciones
- Tareo 31.08.2019Documento411 páginasTareo 31.08.2019Kenny Jiménez RuizAún no hay calificaciones
- PLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Documento26 páginasPLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Kenny Jiménez RuizAún no hay calificaciones
- Tareos 14.07.19Documento712 páginasTareos 14.07.19Kenny Jiménez RuizAún no hay calificaciones
- Anexo #06 Programa de Simulacros 2019Documento1 páginaAnexo #06 Programa de Simulacros 2019Kenny Jiménez RuizAún no hay calificaciones
- FMD Brochure 2018Documento12 páginasFMD Brochure 2018Kenny Jiménez RuizAún no hay calificaciones
- AnemiaDocumento2 páginasAnemiaKenny Jiménez RuizAún no hay calificaciones
- Copia de 4 - Formato para Ingreso-Salida de PertenenciasDocumento2 páginasCopia de 4 - Formato para Ingreso-Salida de PertenenciasKenny Jiménez RuizAún no hay calificaciones
- Plan de Trabajo Kenny JiménezDocumento2 páginasPlan de Trabajo Kenny JiménezKenny Jiménez RuizAún no hay calificaciones
- Calculo I Trabajo FinalDocumento36 páginasCalculo I Trabajo FinalKenny Jiménez RuizAún no hay calificaciones
- Levantamiento topográfico y toma de coordenadas en Las BambasDocumento21 páginasLevantamiento topográfico y toma de coordenadas en Las BambasKenny Jiménez RuizAún no hay calificaciones
- Documento Alcance Muestreo Relaves Rev 1Documento7 páginasDocumento Alcance Muestreo Relaves Rev 1Kenny Jiménez RuizAún no hay calificaciones
- Ejercicios2 Mate IIIDocumento1 páginaEjercicios2 Mate IIIKenny Jiménez RuizAún no hay calificaciones
- Platinas de Acero PDFDocumento1 páginaPlatinas de Acero PDFKenny Jiménez RuizAún no hay calificaciones
- Trabajo Final BombasDocumento8 páginasTrabajo Final BombasKenny Jiménez RuizAún no hay calificaciones
- Levantamiento topográfico y toma de coordenadas en Las BambasDocumento21 páginasLevantamiento topográfico y toma de coordenadas en Las BambasKenny Jiménez RuizAún no hay calificaciones
- Neupex PDFDocumento36 páginasNeupex PDFKenny Jiménez Ruiz100% (1)
- FISICADocumento10 páginasFISICAKenny Jiménez RuizAún no hay calificaciones
- Acta ReunionDocumento1 páginaActa ReunionKenny Jiménez RuizAún no hay calificaciones
- Word Examen - Jimenez RuizDocumento5 páginasWord Examen - Jimenez RuizKenny Jiménez RuizAún no hay calificaciones
- Cronograma Curso Febrero 2017Documento2 páginasCronograma Curso Febrero 2017Kenny Jiménez RuizAún no hay calificaciones
- Metrado de Barandas de TránsitoDocumento3 páginasMetrado de Barandas de TránsitoKenny Jiménez RuizAún no hay calificaciones
- Valores y Vectores Propios.Documento5 páginasValores y Vectores Propios.MYKEL FARIASAún no hay calificaciones
- 2 Trabajo Integrador de Algebra LinealDocumento10 páginas2 Trabajo Integrador de Algebra LinealSteven PizarroAún no hay calificaciones
- Vectores 2Documento6 páginasVectores 2Rusbel ValdiviaAún no hay calificaciones
- 06-12-2020taller 009. Algoritmos - Ciclicos - Con - Matrices PDFDocumento10 páginas06-12-2020taller 009. Algoritmos - Ciclicos - Con - Matrices PDFDania GomezAún no hay calificaciones
- ITM-Álgebra LinealDocumento15 páginasITM-Álgebra Linealmsosa73Aún no hay calificaciones
- Gradiente y derivada direccionalDocumento2 páginasGradiente y derivada direccionalEzequiel SaliAún no hay calificaciones
- Plan de Evaluación de Algebra y GeometriaDocumento2 páginasPlan de Evaluación de Algebra y GeometriaRamon FlorethzAún no hay calificaciones
- Calculo Ii Producto Academico 02Documento6 páginasCalculo Ii Producto Academico 02John YupanquiAún no hay calificaciones
- Módulo MattDocumento31 páginasMódulo MattValandalvs Aguilar50% (2)
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO9)Documento16 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO9)ballenjavierAún no hay calificaciones
- Guia 6 AL y EDO MAT4 AMB 2020-2 Transformaciones LinealesDocumento3 páginasGuia 6 AL y EDO MAT4 AMB 2020-2 Transformaciones LinealesIGNACIO EDUARDO ÁLVAREZAún no hay calificaciones
- Operaciones con vectores y matricesDocumento3 páginasOperaciones con vectores y matricesjuan brahian ruiz0% (1)
- Determinantes y Su Aplicación en La InformáticaDocumento9 páginasDeterminantes y Su Aplicación en La InformáticaJuan Carlos Prieto0% (1)
- Autovalores y autovectores onlineDocumento4 páginasAutovalores y autovectores onlineNicolás Camargo RojasAún no hay calificaciones
- Plan - 1168 - Algebra LinealDocumento25 páginasPlan - 1168 - Algebra LinealGerardoSánchezAún no hay calificaciones
- Perfil profesional electrónicoDocumento105 páginasPerfil profesional electrónicojose luis terrazas aceveAún no hay calificaciones
- Problemas de Vectores y EstaticaDocumento10 páginasProblemas de Vectores y EstaticaElvis Meléndez MachacaAún no hay calificaciones
- Espacios vectoriales: cuerpos, anillos y propiedadesDocumento39 páginasEspacios vectoriales: cuerpos, anillos y propiedadesjmsrealesAún no hay calificaciones
- MA264 Sesi N 2.2.B Base y Dimensi NDocumento16 páginasMA264 Sesi N 2.2.B Base y Dimensi NJenner Mendoza MinayaAún no hay calificaciones
- Calculadora Victor JimenezDocumento16 páginasCalculadora Victor JimenezDayling JimenezAún no hay calificaciones
- Ejercicios No. 11 AYPR-12 PSP 2023-1 - Programación en Python Con MatricesDocumento2 páginasEjercicios No. 11 AYPR-12 PSP 2023-1 - Programación en Python Con Matricesangie torresAún no hay calificaciones
- Valores y Vectores Propios Matriz 3x3 Multiplicidad 2 Ej 4Documento3 páginasValores y Vectores Propios Matriz 3x3 Multiplicidad 2 Ej 4Roberto VallejoAún no hay calificaciones
- Métodos Matemáticos FísicaDocumento101 páginasMétodos Matemáticos FísicaÁngel CapulínAún no hay calificaciones
- Intro 01 Guia de MatlabDocumento23 páginasIntro 01 Guia de MatlabGénesis MaydanaAún no hay calificaciones
- Análisis Tiempo Historia Con Mathcad PrimeDocumento34 páginasAnálisis Tiempo Historia Con Mathcad PrimeGilmer Calderon QuispeAún no hay calificaciones
- Semana 9 Determinante Propiedades Desarrollo de CofactoresDocumento2 páginasSemana 9 Determinante Propiedades Desarrollo de CofactoresMiguel Valverde MoralesAún no hay calificaciones
- Sol Sistemas PDFDocumento103 páginasSol Sistemas PDFHector Riffo ParraAún no hay calificaciones
- P 2Documento5 páginasP 2Abner Ramos ApazaAún no hay calificaciones
- 2 Vectores 3dDocumento14 páginas2 Vectores 3dFELIPE LOAYZA BERAMENDIAún no hay calificaciones
- RESUMEN DOCENTE VECTORES EN R2 y R3Documento3 páginasRESUMEN DOCENTE VECTORES EN R2 y R3Robert CabreraAún no hay calificaciones