También podría gustarte
- Diseño Estructural de BuzonDocumento6 páginasDiseño Estructural de Buzonnaldo1584100% (2)
- NORMA ASTM F2620-13 Espanol y DestacadosDocumento29 páginasNORMA ASTM F2620-13 Espanol y DestacadosJorge Luis Flores Olivos100% (5)
- Programa Diseño Revisión Placa Base Anclas Columnas Acero Tesis U Puebla México 2Documento0 páginasPrograma Diseño Revisión Placa Base Anclas Columnas Acero Tesis U Puebla México 2cocococo1100% (1)
- Expediente Tecnico OsceDocumento19 páginasExpediente Tecnico OsceGreco CortezAún no hay calificaciones
- Solucion de Armaduras Por El Metodo de FlexibilidadesDocumento22 páginasSolucion de Armaduras Por El Metodo de FlexibilidadesAlvaro HernandezAún no hay calificaciones
- Manual de Mantenimiento, Operacion e Instalacion de CilindroDocumento6 páginasManual de Mantenimiento, Operacion e Instalacion de CilindroElmer PatpaulAún no hay calificaciones
- Reglas de Combinación ModalDocumento4 páginasReglas de Combinación ModalIcei Zambrano100% (1)
- Semana 1. Bases y Fundamentos Del Análisis EstructuralDocumento53 páginasSemana 1. Bases y Fundamentos Del Análisis EstructuralMBA Ing Marlon Cubas ArmasAún no hay calificaciones
- Condensación de Una Matriz de RigidezDocumento7 páginasCondensación de Una Matriz de RigidezyaserAún no hay calificaciones
- Marco Teorico Aisladores SismicosDocumento16 páginasMarco Teorico Aisladores SismicosArmando UgarteAún no hay calificaciones
- La Redaccion CientificaDocumento94 páginasLa Redaccion CientificaRiver Vasquez100% (1)
- El Horizote Medio e Chile Peru y Bolivia PDFDocumento342 páginasEl Horizote Medio e Chile Peru y Bolivia PDFluis taboadaAún no hay calificaciones
- Cálculo de deformaciones energéticasDocumento21 páginasCálculo de deformaciones energéticasDemian93100% (1)
- 3 Calculo Hidraulico RedesDocumento69 páginas3 Calculo Hidraulico Redesnaldo1584Aún no hay calificaciones
- Pernos de AnclajeDocumento15 páginasPernos de AnclajeJavier Droguett100% (1)
- Tarea 1Documento5 páginasTarea 1Max SifuentesAún no hay calificaciones
- Metodo de Los Tres MomentosDocumento26 páginasMetodo de Los Tres MomentosKevin Gustavo PantojaAún no hay calificaciones
- Grados de indeterminación estructuralDocumento18 páginasGrados de indeterminación estructuralCristianHerbasPillacaAún no hay calificaciones
- Solucionario Del Examen ParcialDocumento17 páginasSolucionario Del Examen Parcialjahzeel jimenez RiosAún no hay calificaciones
- Guia #1 Carga AxialDocumento5 páginasGuia #1 Carga AxialCarlos IrahetaAún no hay calificaciones
- Sofware Hidrologia V5Documento100 páginasSofware Hidrologia V5claudio7ceAún no hay calificaciones
- Analisis y Diseño de Una Edificación de Albañilería Confinada de 3 Pisos 1Documento17 páginasAnalisis y Diseño de Una Edificación de Albañilería Confinada de 3 Pisos 1MayteAnailAún no hay calificaciones
- Análisis y diseño de vigas en T con menos deDocumento37 páginasAnálisis y diseño de vigas en T con menos deMiller De La CruzAún no hay calificaciones
- Expediente Técnico Emergencia Vial Aucara - CharallaDocumento17 páginasExpediente Técnico Emergencia Vial Aucara - Charallablogger_chacralla100% (5)
- Calculo de DesarenadorDocumento2 páginasCalculo de Desarenadornaldo1584Aún no hay calificaciones
- Vigas y Sistemas de Pisos en Una Sola DireccionDocumento55 páginasVigas y Sistemas de Pisos en Una Sola DireccionJosec Melendez100% (1)
- Cuestionario DesarrolladoDocumento9 páginasCuestionario DesarrolladoSegundo Ramirez NavarroAún no hay calificaciones
- 7 Matriz de Rigidez de Un Elemento Prismático Sometido en SusDocumento11 páginas7 Matriz de Rigidez de Un Elemento Prismático Sometido en SusDidi MezaAún no hay calificaciones
- Método de Rigidez NO SistematizadoDocumento11 páginasMétodo de Rigidez NO SistematizadoGonzalo GarciaAún no hay calificaciones
- METODO VOLADIZO y MCLEODDocumento9 páginasMETODO VOLADIZO y MCLEODJhosep MontoroAún no hay calificaciones
- Amortiguamiento en EstructurasDocumento5 páginasAmortiguamiento en EstructurasNestor Ch R0% (1)
- Pseudo 3DDocumento33 páginasPseudo 3DDavid Bustios GarciaAún no hay calificaciones
- Edificios SimplesDocumento7 páginasEdificios SimplesSamara LópezAún no hay calificaciones
- Integral de DuhamelDocumento14 páginasIntegral de DuhamelAlex Guerrero CelmiAún no hay calificaciones
- Correccion Por Torsion Ejercicio 2 PDFDocumento12 páginasCorreccion Por Torsion Ejercicio 2 PDFDANIEL CORNEJO MOREAún no hay calificaciones
- Matriz de Rigidez Lateral y Apoyos ElasticosDocumento18 páginasMatriz de Rigidez Lateral y Apoyos ElasticosTatiana Peña MendozaAún no hay calificaciones
- Diseño de Columnas E.060 Dual Tipo IDocumento6 páginasDiseño de Columnas E.060 Dual Tipo ISergio Pumaricra CarrilloAún no hay calificaciones
- S9 - VIRTUAL GU+ìA LAB - Cargas Distribuidas en Vigas - Pr+ícticaDocumento6 páginasS9 - VIRTUAL GU+ìA LAB - Cargas Distribuidas en Vigas - Pr+ícticaSamanta MichelleAún no hay calificaciones
- Metodos de IntegraciónDocumento10 páginasMetodos de IntegraciónGeanmarco Mendoza RoqueAún no hay calificaciones
- Unidad 3 AnalisisDocumento47 páginasUnidad 3 Analisisclaudio damian alvarez bastiasAún no hay calificaciones
- Ecuaciones CanónicasDocumento3 páginasEcuaciones CanónicasAbel Bonifacio VergaraAún no hay calificaciones
- Formulación Del Problema Fibras de AceroDocumento12 páginasFormulación Del Problema Fibras de AceroAshly Alvarado JavierAún no hay calificaciones
- Estructuras HiperestáticasDocumento7 páginasEstructuras HiperestáticasRuben David Diaz MorenoAún no hay calificaciones
- Diferencias y Comportamientos de Diafragmas Rigidos y FlexiblesDocumento23 páginasDiferencias y Comportamientos de Diafragmas Rigidos y FlexiblesREINEL RIVERA YULEAún no hay calificaciones
- Informe Metodo MutoDocumento14 páginasInforme Metodo Mutoandrea duranAún no hay calificaciones
- Problemas 1Documento5 páginasProblemas 1Oscar AbudAún no hay calificaciones
- Semana 3 - Ingenieria Sismorresistente - UtpDocumento29 páginasSemana 3 - Ingenieria Sismorresistente - UtpJhon Sanchez FloresAún no hay calificaciones
- HT-02 InecuacionesDocumento2 páginasHT-02 InecuacionesLilibeth BacaAún no hay calificaciones
- Ánálisis Matricial de Cerchas 3DDocumento10 páginasÁnálisis Matricial de Cerchas 3DGuillermo GamezAún no hay calificaciones
- Cálculo Numérico Integral de Duhamel Sistema Sin Amortiguación.Documento8 páginasCálculo Numérico Integral de Duhamel Sistema Sin Amortiguación.j-balderasAún no hay calificaciones
- Análisis Estructural Del Artículo CientíficoDocumento6 páginasAnálisis Estructural Del Artículo CientíficoLuis FernandoAún no hay calificaciones
- T 01 El Método de Amplificación de MomentosDocumento9 páginasT 01 El Método de Amplificación de MomentosChristopher Floriano LeónAún no hay calificaciones
- Condensacion Estatica - CinematicaDocumento10 páginasCondensacion Estatica - CinematicaLuis Ypanaque TinedoAún no hay calificaciones
- Puente Sección CompuestaDocumento44 páginasPuente Sección CompuestaManu SantistebanAún no hay calificaciones
- Ejemplo de Analisis Sismico Estatico de Un Edificio PDFDocumento19 páginasEjemplo de Analisis Sismico Estatico de Un Edificio PDFLuis Paxi100% (1)
- Ejercicio 7 AnalisisDocumento2 páginasEjercicio 7 AnalisisNick Huanca AlmanzaAún no hay calificaciones
- Integral de Duhamel (Pag.17)Documento28 páginasIntegral de Duhamel (Pag.17)Hildebrando Ventura Jorge50% (2)
- Matriz de Rigidez y Matriz de FlexibilidadDocumento5 páginasMatriz de Rigidez y Matriz de FlexibilidadGonzalo Quelcca AtahualpaAún no hay calificaciones
- Pre Dimensionamiento de Elementos EstructuralesDocumento8 páginasPre Dimensionamiento de Elementos EstructuralesSleyter SaavedraAún no hay calificaciones
- Efectos o Manifestaciones de Los Sismos2Documento26 páginasEfectos o Manifestaciones de Los Sismos2Clever Alejandro Ugarte RamosAún no hay calificaciones
- Diseño de Cimentaciones Superficiales PDFDocumento70 páginasDiseño de Cimentaciones Superficiales PDFIngrid Lorena Bautista VegaAún no hay calificaciones
- 2017 2 DIN Taller4 ConservacionDocumento2 páginas2017 2 DIN Taller4 Conservacionaker_wildchildAún no hay calificaciones
- Unidad 2. Muros EspecialesDocumento57 páginasUnidad 2. Muros EspecialesIVAN ARIASAún no hay calificaciones
- Análisis y diseño estructural de restaurante aporticadoDocumento46 páginasAnálisis y diseño estructural de restaurante aporticadoDhan AntonyAún no hay calificaciones
- AMS sintonizados para reducir oscilaciones en estructurasDocumento21 páginasAMS sintonizados para reducir oscilaciones en estructurasByronAún no hay calificaciones
- Método de Trabajo Virtual en Vigas y MarcosDocumento7 páginasMétodo de Trabajo Virtual en Vigas y MarcosCarolis JaenAún no hay calificaciones
- 1° Practica AnalisisDocumento4 páginas1° Practica AnalisisJair SPAún no hay calificaciones
- Examen Concreto Armado II PDFDocumento1 páginaExamen Concreto Armado II PDFWalter A. Cruzalegui Bonilla100% (1)
- 4.3 Criterios Generales de Diseno Sismorresistente PDFDocumento83 páginas4.3 Criterios Generales de Diseno Sismorresistente PDFXimena CeraAún no hay calificaciones
- Condensacion de Una Matriz RigidezDocumento11 páginasCondensacion de Una Matriz RigidezAlejandra Briones MartinezAún no hay calificaciones
- Taller Método de Rigidez DirectoDocumento9 páginasTaller Método de Rigidez DirectoHarold LealAún no hay calificaciones
- Taller Método de Rigidez DirectoDocumento9 páginasTaller Método de Rigidez DirectoHarold LealAún no hay calificaciones
- Bocatoma OkDocumento7 páginasBocatoma Oknaldo1584Aún no hay calificaciones
- Desarenador 01 Canal PrincipalDocumento2 páginasDesarenador 01 Canal Principalnaldo1584Aún no hay calificaciones
- E Anexo27E Modelo Terminos de Referencia 3jul 2013Documento4 páginasE Anexo27E Modelo Terminos de Referencia 3jul 2013kevinAún no hay calificaciones
- Desarenador 01 Canal PrincipalDocumento2 páginasDesarenador 01 Canal Principalnaldo1584Aún no hay calificaciones
- Programa de Riego AmancoDocumento6 páginasPrograma de Riego Amanconaldo1584Aún no hay calificaciones
- Memoria de Calculo 01 RuiseñoresDocumento2 páginasMemoria de Calculo 01 Ruiseñoresnaldo1584Aún no hay calificaciones
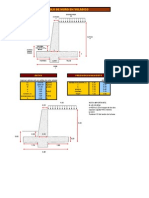
- Calculo de muro en voladizoDocumento4 páginasCalculo de muro en voladizo16536799Aún no hay calificaciones
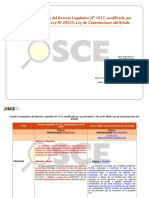
- Cuadro Comparado Ley 30225 DL 1444 - VF PDFDocumento55 páginasCuadro Comparado Ley 30225 DL 1444 - VF PDFKENG YOSHI INGA OCHOAAún no hay calificaciones
- CuadroComparativo - Ley - Con - Ley 30225-Julio-2014 PDFDocumento117 páginasCuadroComparativo - Ley - Con - Ley 30225-Julio-2014 PDFPedro Juan Santos PalaciosAún no hay calificaciones
- Tuberias AlcantarilladoDocumento3 páginasTuberias Alcantarilladonaldo1584Aún no hay calificaciones
- Area de UsoDocumento2 páginasArea de Usonaldo1584Aún no hay calificaciones
- Reporte BuzonesDocumento4 páginasReporte Buzonesnaldo1584Aún no hay calificaciones
- Calculo Vigas MetalicasDocumento39 páginasCalculo Vigas MetalicasRicardo VpAún no hay calificaciones
- Calculo de Ficha Snip - 020109Documento17 páginasCalculo de Ficha Snip - 020109naldo1584Aún no hay calificaciones
- DISEÑO TANQUE SEDIMENTADOR CILINDRICODocumento4 páginasDISEÑO TANQUE SEDIMENTADOR CILINDRICOnaldo1584Aún no hay calificaciones
- BECERRIL JOSE V Problemario de Vectores Rectas Planos SistemDocumento278 páginasBECERRIL JOSE V Problemario de Vectores Rectas Planos SistemRaúl Venegas MunitaAún no hay calificaciones
- Ingenieria Civil en El PeruDocumento19 páginasIngenieria Civil en El PeruVladimir Trucios70% (10)
- 10 Deshidratador de LodosDocumento2 páginas10 Deshidratador de Lodosnaldo1584Aún no hay calificaciones
- Memoria Descriptiva IndependizarDocumento4 páginasMemoria Descriptiva Independizarnaldo1584Aún no hay calificaciones
- Diseño Reservorios CircularesDocumento16 páginasDiseño Reservorios Circularesskhann29Aún no hay calificaciones
- Calculo Hidraulico Linea de AduccionDocumento4 páginasCalculo Hidraulico Linea de Aduccionnaldo1584Aún no hay calificaciones
- 1 Calculo EstructuralDocumento47 páginas1 Calculo Estructuralnaldo1584Aún no hay calificaciones
- 2 Calculo PoblacionalDocumento8 páginas2 Calculo Poblacionalnaldo1584Aún no hay calificaciones
- CAL ESTRIBO PTE LA ANGELICA L 20mDocumento43 páginasCAL ESTRIBO PTE LA ANGELICA L 20mnaldo1584Aún no hay calificaciones
- Materias Primas AlgodonDocumento15 páginasMaterias Primas AlgodonhockpinAún no hay calificaciones
- Obtención de La Sal en Galera ZambaDocumento15 páginasObtención de La Sal en Galera ZambaJhonnathan VillacisAún no hay calificaciones
- Grupo 4Documento3 páginasGrupo 4Sagbay DianaAún no hay calificaciones
- Clase de Diagramas Ttt. 2015 PDFDocumento25 páginasClase de Diagramas Ttt. 2015 PDFJhonathan TiradoAún no hay calificaciones
- Evapotranspiración de referencia: métodos para su determinaciónDocumento69 páginasEvapotranspiración de referencia: métodos para su determinaciónBeatriz Toledo AndiaAún no hay calificaciones
- Catálogo Baño y Diseño 2018 CtT7oyCDocumento23 páginasCatálogo Baño y Diseño 2018 CtT7oyCchinese0608Aún no hay calificaciones
- Examen Trabajo Práctico 4 (TP4) 100Documento7 páginasExamen Trabajo Práctico 4 (TP4) 100Tomas PellettiAún no hay calificaciones
- Estimación de La Ley de Corte Critica - Rincon MineroDocumento14 páginasEstimación de La Ley de Corte Critica - Rincon MineroEdwin MinasAún no hay calificaciones
- Lbu 01 08Documento2 páginasLbu 01 08Elena GrundyAún no hay calificaciones
- Tiro IdesDocumento12 páginasTiro IdesLucia Alvarez GarciaAún no hay calificaciones
- Triptico Gel para CabelloDocumento3 páginasTriptico Gel para CabelloMERCEDES ANDREA FLORES FLORESAún no hay calificaciones
- Trabajo de Campo (Entrevistas)Documento7 páginasTrabajo de Campo (Entrevistas)Belèn HernandezAún no hay calificaciones
- Ficha Tecnica Cal VivaDocumento2 páginasFicha Tecnica Cal Vivaerika jazmine rojas perdomoAún no hay calificaciones
- 1 PB PDFDocumento14 páginas1 PB PDFBenjamín MoureAún no hay calificaciones
- Superconductividad: Breve Historia y AplicacionesDocumento18 páginasSuperconductividad: Breve Historia y AplicacionesJosé Arturo Celis GilAún no hay calificaciones
- Resumen Cap 1 2 3 FoglerDocumento5 páginasResumen Cap 1 2 3 FoglerJuan Manuel Pozo VillarroelAún no hay calificaciones
- Dinamica de Las Bacterias de InteresDocumento170 páginasDinamica de Las Bacterias de InteresheraslalyAún no hay calificaciones
- Determinación Del Contenido de Agua en El Gas Natural Mediante El Empleo de CorrelacionesDocumento11 páginasDeterminación Del Contenido de Agua en El Gas Natural Mediante El Empleo de CorrelacionesAnonymous bKdZreEGv100% (1)
- 1 HibridacionDocumento40 páginas1 HibridacionMiguel Angel VcAún no hay calificaciones
- Manual Seguridad Medio Ambiental SENASADocumento192 páginasManual Seguridad Medio Ambiental SENASABernabe A AcosAún no hay calificaciones
- Problemario de ComplejometríaDocumento2 páginasProblemario de ComplejometríaAlberto MartinezAún no hay calificaciones
- Anónimo. Árboles Fijadores de NitrogenoDocumento7 páginasAnónimo. Árboles Fijadores de NitrogenoKeny Pastor100% (1)
- Fotografia en Eastman DoubleDocumento6 páginasFotografia en Eastman DoubleIon Mikel Onandia MartinezAún no hay calificaciones
- Cuestionario ElectricidadDocumento3 páginasCuestionario Electricidadluis amayaAún no hay calificaciones