También podría gustarte
- Algoritmos Paralelos Practica 05 - Dekker Caso Banquero Sincronizaion Peterson-Exclusion Mutua DeckerDocumento9 páginasAlgoritmos Paralelos Practica 05 - Dekker Caso Banquero Sincronizaion Peterson-Exclusion Mutua DeckeruniverAún no hay calificaciones
- 202 Problemas ARCODocumento57 páginas202 Problemas ARCOMiguel Angel Arrua100% (1)
- Ejercicios SQLDocumento6 páginasEjercicios SQLvanegutyAún no hay calificaciones
- Estructura Repetitiva Parte IIDocumento5 páginasEstructura Repetitiva Parte IIame_jac746603Aún no hay calificaciones
- Gobierno de TI: estructura, roles y procesos claveDocumento14 páginasGobierno de TI: estructura, roles y procesos claveAlberto CastilloAún no hay calificaciones
- Assembler Paso A PasoDocumento3 páginasAssembler Paso A PasoIvanZavaletaAún no hay calificaciones
- Investigacion C++Documento3 páginasInvestigacion C++enzonadalesAún no hay calificaciones
- Cuaderno FBDDocumento83 páginasCuaderno FBDVictorAún no hay calificaciones
- Proyecto Video Club El Gallo Sampedrano PDFDocumento81 páginasProyecto Video Club El Gallo Sampedrano PDFLuis GoQui50% (2)
- Boletín Comandos Windows PDFDocumento3 páginasBoletín Comandos Windows PDFMiguelAún no hay calificaciones
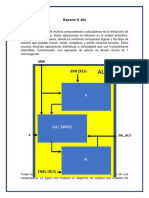
- Practica U AluDocumento5 páginasPractica U AluAmigos LolerosAún no hay calificaciones
- Evaluación T2 - Ug-2020Documento7 páginasEvaluación T2 - Ug-2020Steven Ludeña GavinoAún no hay calificaciones
- Ensayo Base de Datos OOs V02 - DgualeDocumento7 páginasEnsayo Base de Datos OOs V02 - DgualedolferguAún no hay calificaciones
- Examen 1Documento13 páginasExamen 1Jairo FernándezAún no hay calificaciones
- Cuestionario ArquitecturaDocumento6 páginasCuestionario ArquitecturaJose MongeAún no hay calificaciones
- Taller HAIDocumento2 páginasTaller HAIMiguel Alfonso Feijoo GarcíaAún no hay calificaciones
- Práctica Calificada 13Documento3 páginasPráctica Calificada 13Luis Mercado Mori0% (1)
- Superbloque y sistemas de archivosDocumento7 páginasSuperbloque y sistemas de archivosGeronimo Ortega0% (2)
- Autoevaluacion Capitulo 2 ProgramacionDocumento3 páginasAutoevaluacion Capitulo 2 Programacionk1ngu100% (1)
- Desarrollo de SistemasDocumento3 páginasDesarrollo de SistemasUzi J. Rodríguez0% (1)
- Ipv6 Trabajo de InvestigacionDocumento5 páginasIpv6 Trabajo de InvestigacionLuis Alvarez VargasAún no hay calificaciones
- Manual ClipsDocumento30 páginasManual ClipsMaria Soledad PetrinoAún no hay calificaciones
- Ejercicios ResueltosDocumento12 páginasEjercicios ResueltosPecos Bill Pecosin LopezAún no hay calificaciones
- Tecnicas de Asignacion de Registros en Un CompiladorDocumento5 páginasTecnicas de Asignacion de Registros en Un CompiladorAsahel Soto GarciaAún no hay calificaciones
- Tabla de Simbolos para Un Analizador LexicoDocumento17 páginasTabla de Simbolos para Un Analizador LexicoChristian Martinez GarciaAún no hay calificaciones
- BD Objeto-RelacionalesDocumento11 páginasBD Objeto-RelacionalesKlaus CRAún no hay calificaciones
- Taller SQL EjerciciosDocumento8 páginasTaller SQL EjerciciosFreddy LitumaAún no hay calificaciones
- Ejercicios Arreglos UnidimensionalesDocumento1 páginaEjercicios Arreglos UnidimensionalesWilliam GarciaAún no hay calificaciones
- Window 98 y Window XPDocumento75 páginasWindow 98 y Window XPJose LuisAún no hay calificaciones
- Quick SortDocumento10 páginasQuick SortLuis Alvarez VargasAún no hay calificaciones
- Problemas de sistemas de información en empresas minoristasDocumento3 páginasProblemas de sistemas de información en empresas minoristasNAARAAún no hay calificaciones
- Gestion de Procesos en LinuxDocumento14 páginasGestion de Procesos en LinuxCastro CRAún no hay calificaciones
- Responder So - Practica 4Documento3 páginasResponder So - Practica 4ginger moraAún no hay calificaciones
- Linux y C: Procesos, ejecución y comunicaciónDocumento17 páginasLinux y C: Procesos, ejecución y comunicaciónJohan PeraltaAún no hay calificaciones
- Examen Inteligencia Artificial PDFDocumento8 páginasExamen Inteligencia Artificial PDFNessir Aroni AlvarezAún no hay calificaciones
- Manual SQL PLUS OracleDocumento19 páginasManual SQL PLUS OracleMarc SerravinyalsAún no hay calificaciones
- 33 Ejercicios en CDocumento30 páginas33 Ejercicios en CLilith DarkAún no hay calificaciones
- Arquitectura de software, líneas de producto y SOADocumento30 páginasArquitectura de software, líneas de producto y SOAMaite CruzAún no hay calificaciones
- Sentencias SQL - Oracle Con ResultadosDocumento3 páginasSentencias SQL - Oracle Con ResultadosJoshue LabordeAún no hay calificaciones
- Taller en Clases ArquicteturaDocumento2 páginasTaller en Clases ArquicteturaRUBEN DARIO SAA MONTAÑO100% (1)
- Introduccion A Las Arquitecturas Paralelas PDFDocumento51 páginasIntroduccion A Las Arquitecturas Paralelas PDFkanzazzAún no hay calificaciones
- Guia de Arquitectura de Computadoras IIDocumento31 páginasGuia de Arquitectura de Computadoras IIManuel CastilloAún no hay calificaciones
- Modelo Basado en ComponentesDocumento4 páginasModelo Basado en ComponentesjuanconnorAún no hay calificaciones
- Optimizacion Consultas 2Documento33 páginasOptimizacion Consultas 2Mercy OspinaAún no hay calificaciones
- Tema 2. Generación de Código IntermedioDocumento26 páginasTema 2. Generación de Código IntermedioGabriel Tejero RomeroAún no hay calificaciones
- Arquitectura NETDocumento23 páginasArquitectura NETfreddy15542Aún no hay calificaciones
- prOCEDIMIENTOS ALMACENADOSDocumento6 páginasprOCEDIMIENTOS ALMACENADOSTania PcAún no hay calificaciones
- Lectura y Escritura de Ficheros.Documento4 páginasLectura y Escritura de Ficheros.Marjo Dennis RSAún no hay calificaciones
- DB Procedimientos Almacenados CLR CDocumento12 páginasDB Procedimientos Almacenados CLR CCamilo Alberto Prieto RodrigezAún no hay calificaciones
- Cuestionario HW - 2019-1Documento10 páginasCuestionario HW - 2019-1Eduar Jair GaonaAún no hay calificaciones
- YaccDocumento17 páginasYaccAlex FuserAún no hay calificaciones
- Modelos de Color Yiq y HsiDocumento6 páginasModelos de Color Yiq y HsiLuis H. FosadoAún no hay calificaciones
- Dominios de PostgresDocumento3 páginasDominios de PostgresBenjaminAún no hay calificaciones
- Ejercicios de Fundamentos de PROGRAMACIONDocumento8 páginasEjercicios de Fundamentos de PROGRAMACIONAlexis OrellanaAún no hay calificaciones
- ModelosAgilesDocumento5 páginasModelosAgilesJoan GilAún no hay calificaciones
- Analisis Algoritmos y ProgramacionDocumento47 páginasAnalisis Algoritmos y ProgramacionErnesto Machuca100% (1)
- Arraylist de Objetos en JavaDocumento4 páginasArraylist de Objetos en Javamiguel9309Aún no hay calificaciones
- PRACTICA Salesiana ANALISIS Y DISEÑO DE SISTEMASDocumento4 páginasPRACTICA Salesiana ANALISIS Y DISEÑO DE SISTEMASSergio Quispe Flores100% (1)
- Métodos de OrdenamientoDocumento12 páginasMétodos de OrdenamientoLuis MiguelAún no hay calificaciones
- Metodos de DireccionamientoDocumento3 páginasMetodos de DireccionamientoRamiro Herrera CastroAún no hay calificaciones
- Arreglos BidimensionalesDocumento17 páginasArreglos BidimensionalesJuan Carlos Petronilo EstradaAún no hay calificaciones
- Set de Instruc SimuprocDocumento5 páginasSet de Instruc SimuprocEric AlmendrasAún no hay calificaciones
- Unidad1 Panorama Del Hardware de La IBM PCDocumento31 páginasUnidad1 Panorama Del Hardware de La IBM PCtcondesAún no hay calificaciones
- Trabajo Memoria CachéDocumento18 páginasTrabajo Memoria CachéSandra Jaquel Timoteo GuerreroAún no hay calificaciones
- ATmega 164p (ESP)Documento378 páginasATmega 164p (ESP)inalac2Aún no hay calificaciones
- El Libro de Codigo Maquina Del SPECTRUMDocumento267 páginasEl Libro de Codigo Maquina Del SPECTRUMJuan Pedro Reyes Sandoval100% (2)
- Configuración red PPI maestro-esclavoDocumento15 páginasConfiguración red PPI maestro-esclavoMartinBancheroAún no hay calificaciones
- 35 Instrucciones Del Ensamblador MpasmDocumento18 páginas35 Instrucciones Del Ensamblador MpasmJorge Alberto Guzman GutierrezAún no hay calificaciones
- Interfaz Con Memoria PDFDocumento7 páginasInterfaz Con Memoria PDFNelson LozanoAún no hay calificaciones
- Metodos de DireccionamientoDocumento34 páginasMetodos de Direccionamientoblanca_diaz6803100% (2)
- CracksLatinoS! 2010: Emula mochila Sentinel para ejecutar programa sin protecciónDocumento18 páginasCracksLatinoS! 2010: Emula mochila Sentinel para ejecutar programa sin proteccióncarlosalberto_28Aún no hay calificaciones
- Sislab 1Documento14 páginasSislab 1Erick Alvarez CastañedaAún no hay calificaciones
- Microprocesador 3 PDFDocumento60 páginasMicroprocesador 3 PDFMar YfhAún no hay calificaciones
- Microcontrolador 8051Documento139 páginasMicrocontrolador 8051lgrome73100% (4)
- SET de Instrucciones Del 8085Documento98 páginasSET de Instrucciones Del 8085MEKArot100% (1)
- REPASOPRUEBADocumento14 páginasREPASOPRUEBAElizabethMacasAún no hay calificaciones
- 04-Introducción A La Programación de Virus en ASMDocumento12 páginas04-Introducción A La Programación de Virus en ASMfabioeAún no hay calificaciones
- Los Registros Del MicroprocesadorDocumento7 páginasLos Registros Del MicroprocesadorEdgardo Ortega DelgadoAún no hay calificaciones
- Arquitectura Harvard y Von NeumannDocumento64 páginasArquitectura Harvard y Von NeumannIrvin CamposAún no hay calificaciones
- Cómo explotar vulnerabilidades de desbordamiento de búfer de pilaDocumento14 páginasCómo explotar vulnerabilidades de desbordamiento de búfer de pilaAneudy Hernandez PeñaAún no hay calificaciones
- Punteros en C#Documento15 páginasPunteros en C#carlos100% (1)
- Curso Básico de EnsambladorDocumento58 páginasCurso Básico de EnsambladorBoris Lara100% (5)
- Direccionamiento de MemoriaDocumento10 páginasDireccionamiento de MemoriaGustavo Joaquín Bustamante JaureAún no hay calificaciones
- Caracteristicas Del MicroprocesadorDocumento22 páginasCaracteristicas Del MicroprocesadorJose MartinezAún no hay calificaciones
- Microcontrolador COP8 PDFDocumento110 páginasMicrocontrolador COP8 PDFEmmanuelAraujoAún no hay calificaciones
- Espacio de Direcciones - SODocumento14 páginasEspacio de Direcciones - SONancy Ccoropuna CondoriAún no hay calificaciones
- Arquitectura de Computadores IIIDocumento34 páginasArquitectura de Computadores IIIViviana MonsalveAún no hay calificaciones
- Tema 1 - ApuntesDocumento15 páginasTema 1 - ApuntesIván Jiménez LabsAún no hay calificaciones
- Fundamentos del software CPUDocumento3 páginasFundamentos del software CPUGiorgioAún no hay calificaciones
- Archivos y PunterosDocumento11 páginasArchivos y PunterosAndrea Hernandez100% (1)