El concepto de programa motor se basa en la
(posibilidad de efectuar una accién incluso en
cia de feedback, Las érdenes preestruc~
ias son capaces de iniciar el movimiento
tener en cuenta las consecuencias de la
SISTEMAS DE CIRCUITO
IERTO (OPEN-LOOP) Y CIRCUITO
DO (CLOSED-LOOP)
l tipo de control definido como (open-
), 10s comandos ejecutives (programa
¥ parimetros) que salen de! centro de
ii del movimiento hacia los. rgancs
cores se encuentran completamente es-
jeados a priori. El sisteman de circuito
jo no posee capacidades correctivas
He el acto motor, el feedback sensorial
ser eventualmente utilizado solamente
inal para verificar silos objetivos han sido
-zuidos y para programar una nueva res-
. Este sistema de control es similar al
regula un seméforo en_un cruce. La
cia temporal rigida de Iuces es eficaz
€l trético es normal, pero se vuelve
tuada en cl caso de un accidente. El sis-
de cieuito abierto, eficaz en situaciones
¥ ficilmente previsibles, es response
$= la cjecucién de movimientos balisticos,
‘que el feedback sensorial es demasiado
para ser empleado,
sistema de control de circuito cerrado
loop) prevé, durante la aceién, el
1 informaciones de retomo para ean
el movimiento en curso. Las informa-
‘gue parten del sistema ejecutivo (cen-
sé toms de decisiones), son transmitidas
tema efector (musculatura). De aqui se
Los sistemas
de control
Roberto Besi - Claudio Robazza
derivan sefiales sensoriales sobre el movi-
mento en curso que son enviadas, cerrando el
citeuito, al sistema ejecutivo. Un ejemplo de
este mecanismo se encuentra constituido por
cl funcionamiento del termostato, que man-
tiene la temperatura al nivel deseado, Para tal
operacisn reguladora, son necesarios, al igual
que en el sistema de circuito abierto, un siste-
‘ma de toma de decisiones (Nos mecanismos de
elaboracién de la informaci6n) y un sistema
efector (Ia musculatura). Junto a éstos, en el
sistema de cireuito cerrado existen informa-
ciones de retorno (feedback sensorial) y una
referencia de correceién con la que comparar~
las. Esto permite realizar ajustes en Ia accicn
en curso en caso de error. La referencia de
comreccién esti constituida por las consecuen-
cias sensoriales esperadas recuperadas por la
‘memoria de reconocimiento, Se tata de una
‘imagen mental ideal de la acci6n, en la que se
integran las informaciones derivadas de los
dlistintos analizadores y que ejercita un con-
‘tol de anticipacién de feedback al preparar al
sistema efector para la confrontaciéa con
informaciones reaferentes. Una gimnasta
puede percibir, a nivel cinestésico, una ligera
étdida del equilibrio en la barra debido al
alejamiento entre imagen ideal (resultado
esperado) y respuesta real. Esta comparaciGn
le permite recuperar la postura correcta por
medio de minisculas contracciones compen-
satorias. Un jugador de rughy que recibe el
baldn puede controlar visualmente su legada
esplazando las manos en la direcci6n de la
trayectoria, reduciendo asf los errores de
posicién hasta el momento de la recepeién,
Los dos sistemas de control son interde-
pendientes. Al principio, el control de la
accidn es a circuito abierto, ya que ain no se
encuentra disponible el feedback sensorial. Si
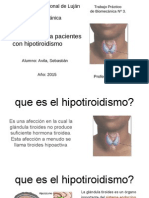
Fg. 7.1. Modelo
‘conceptual de elaboraciin
‘ela injormacién y
roduc dela respuesta
!motora (modificade de
Sena, 199),
Ja aceién ha durado lo suliciente, el control se
hace a circuito cerrado, Se ha propuesto un
‘modelo de elaboracién de la informacién (fig.
7.1) que, junto con los tres estadios de trats-
micnto de la informacién (identficacién de
los estimulos, seleccién de Ia respuesta y
programacién de la misma), presenta otros
Componentes que completan el sistema
efector (Schmidt, 1991), El programa motor
produce sefales eferentes hacia los centros
inferiores del sistema nervioso. (médula
espinal), que a su vez determinan la contrac
cién muscular. Simultsneamente, se especifi-
‘ea una referencia para la comreccién, un feed
‘back sensorial esperado (anticipatorio), para
efinic las cualidades sensoriales del movi
‘miento correcto y compararlas con el acto
real. La valoracién del error que de ello se
deriva permite la modificacién de la accién
para conseguir los objetivos deseados.
embargo, siempre que el feedback prodi
por la respuesia vuelve al sistema ejecutive
para las correcciones, es decir, al init
proceso de elaboracién de las informaciones,
se necesita un tiempo de alrededor de 150.
‘ms para poder observar las primeras modifica
clones en el movimiento. Esto resulta valide
para tareas continuas que presenten na dura
cin relativamente larga, En una carrera de
resistencia, es posible efectuar un control
Conseiente de las sensaciones corporales. y
decidir varia el desarrollo, En muchos gesto
deportivos regulares y muy répidos, este
de adaptaciones no siempre es posible aca
de las considerables restricciones te
impuestas. Golpear, lanzar, tar 0 saltar so
‘gestos normalmente presentes en numeroso
deportes que se desarrollan en tiempos mi
ripidos. También para estos movimientos es
posible un control de circuito cerrado, pero no
Se debe pasar de los estadios de elaboracin de
J informacién, Se trata de modulsciones
seflejas © automatizadas de la aceién que se
producen a escala efectora, en los centros infe-
Flores del sistema nervioso, y que contribuyen
su conjunto a la produeci6n de la respuesta
seseada (Lee, Murphy y Tatton, 1983).
‘Una primera respuesta, un mecanismo
-de compensacién muy répido y con tiempo de
Tatencia de 30 a 50 ms, es activado por la res-
‘puesta refleja monosindptica de estiramiento
La respuesta refleja(representada por el sim-
bolo Mi en Ia fig. 7.1) es responsable de
‘odificaciones en la contracciéa, muscular
‘causadas por estiramientos leves ¢ imprevis.
05 asociados, por cjemplo, a desequilibrios
pposturales 0 a fuerzas extemas inesperads,
Estas compensaciones no involucran a los
=n1F08 nerviosos superiores, sino solamente
42 la médula espinal, y se producen de forma
‘sutomética, sin necesidad de una intervenciGn
‘sonsciente y, por tanto, sin exigiratencién,
‘Una segunda respuesta muy répida (M2 en
4s fig. 7.1, tiene un tiempo de latencia de 50
#80 ms y se denomina respuesiarefleja fun-
‘ional de estiramiento. Con una duraciin més
Jarza que la M1, contribuye principalmente a
‘> compensiciones del movimiento. ‘Tam-
Bign esta respuesta parte de estiramicntos
usculares (registrados. por los reeeptores
espccifcos), y los impulsos son enviados
‘ravés de la nédula espinal alos centros supe-
flores que dependen de la programacién del
‘movimiento (la cortera motora en el cerebro
‘yo el cerebelo). Aqui, los impulsos son ela-
Dorados para la produccién de una respuesta
de adaptacién, que no modifica sustancial-
ment el programa de accién y que, postero
‘mente, es enviada de nuevo a la médula espi-
foal y @ la musculatura. Sin embargo, aunque
fo Se trate de una respuesta voluntaria, que
requerirfa tiempos mis largos, puede ser
‘modificada voluntariamente mediante elabo-
‘aciones conscientes. La capacidad de modu-
lacién posibilita importantes adaptaciones,
‘que utiliza, por ejemplo, el esquiador para
adapiarse a las caracteristicas de la pista
Ambas respuestas reflejas, M1 y M2, presu-
‘ponen una referencia para Ia correcci6n con la
que comparar la acci6n deseada con la real
Una tercera respuesta, denominada sig-
‘gered reaction, con tiempos de Iatencia de 80
I TES! _CCiCSOS np
Los sistemas de control
_-:e,,—etioncinas te contrat
2 120 ms, resulta también demasiado ripida
para ser considerada voluntaria, aun siendo
Posible un mayor control consciente que en la
MD. Presumiblemente, esta respuesta se deri-
vya de estimulaciones que, surgiendo del esti-
ramiento muscular, alcanzan los estadios
superiores de elaboracién y superan cada uno
de ellos. El individuo no se ve obligado a per-
der tiempo en elaboraciones de seleecién y
programacion de la respuesta, y Ia reaccién se
inicia de forma automtica (Schmit, 1987).
Una cuarta respuesta, la respuesta voluntax
via, tiene una latencia de reaccién de 120 a
180 ms. Es el tipo de respuesta més flexible,
ya que puede ser modificada (mediante la
expetiencia, los procesos de anticipacién, las
instrucciones...) y puede afectar cualquier
‘2fupo muscular, independientemente del esti
ramiento. El feedback generado por la res-
Pesta implica a los estadios de elaboracisn
de 1a informacién (mediante el cireuito més
extemo reproducido en Ia fig.7.1). Las reac-
clones son asf més Ientas y requieren el
esfuerzo de los procesos atentivos. Los tiem-
os de reaccién, medidas desde el momento
de la presentacién del estimulo hasta el
comienzo de la respuesta, representan Ia
‘medida de Ia duracién de los tres estadios de
También podría gustarte
- Fisiología del ejercicio físico y del entrenamientoDe EverandFisiología del ejercicio físico y del entrenamientoCalificación: 4.5 de 5 estrellas4.5/5 (8)
- Libro de Neurociencias y Deporte Segunda Parte Capitulo 5y 6Documento36 páginasLibro de Neurociencias y Deporte Segunda Parte Capitulo 5y 6DANIEL ALEJANDRO100% (3)
- Libro de Neurociencias y Deporte Segunda Parte Capitulo3y4Documento37 páginasLibro de Neurociencias y Deporte Segunda Parte Capitulo3y4DANIEL ALEJANDRO100% (1)
- Libro de Neurociencias y Deporte Cuarta y Quinta ParteDocumento58 páginasLibro de Neurociencias y Deporte Cuarta y Quinta ParteDANIEL ALEJANDRO100% (2)
- Libro Neurociencias y Deporte Tercera Parte Capitulo 9 y 10Documento43 páginasLibro Neurociencias y Deporte Tercera Parte Capitulo 9 y 10DANIEL ALEJANDRO100% (3)
- Libro de Neurociencias y Deporte Tercera Parte Capitulo 11y12Documento46 páginasLibro de Neurociencias y Deporte Tercera Parte Capitulo 11y12DANIEL ALEJANDRO100% (1)
- Libro Neurociencias y Deporte Primera ParteDocumento46 páginasLibro Neurociencias y Deporte Primera ParteDANIEL ALEJANDRO95% (19)
- De La Psicología Deportiva A Las Neurociencias Aplicadas Al Deporte PDFDocumento31 páginasDe La Psicología Deportiva A Las Neurociencias Aplicadas Al Deporte PDFWillmary Marin100% (3)
- Neurociencia en Deportes ColectivosDocumento23 páginasNeurociencia en Deportes ColectivosGilmarAntonio0% (1)
- Curso Entrenamiento Mental en Pista PDFDocumento90 páginasCurso Entrenamiento Mental en Pista PDFenricvcfAún no hay calificaciones
- Apuntes Neuro DeporteDocumento6 páginasApuntes Neuro Deporteclaudia JHMAún no hay calificaciones
- El Entrenamiento Psicológico en El Deporte PDFDocumento21 páginasEl Entrenamiento Psicológico en El Deporte PDFmanoilocAún no hay calificaciones
- 1 Volumen 1 FinalDocumento124 páginas1 Volumen 1 FinalNuria Sanchez Carrion100% (1)
- Fundamentos de Táctica y Acción Motriz en El Deporte - Iñaaki Beni Ayerbe PDFDocumento449 páginasFundamentos de Táctica y Acción Motriz en El Deporte - Iñaaki Beni Ayerbe PDFjuancano100% (1)
- La Psicologia Del Arbitraje y Del Juicio DeportivoDocumento23 páginasLa Psicologia Del Arbitraje y Del Juicio DeportivoWilder Arce QuispeAún no hay calificaciones
- 1) Módulo V Liderazgo y Trabajo en Equipo - Mg. Marcelo RoffeDocumento17 páginas1) Módulo V Liderazgo y Trabajo en Equipo - Mg. Marcelo RoffeSilvina Barela100% (1)
- Así Es El Cerebro Del FutbolistaDocumento2 páginasAsí Es El Cerebro Del FutbolistaOsvaldo CortesAún no hay calificaciones
- Cuadernos Psicologia Del Deporte - v11!2!2011Documento137 páginasCuadernos Psicologia Del Deporte - v11!2!2011Hernán Calvo ChirinosAún no hay calificaciones
- Adaptación para Futbolistas (CPRD-F) Del Cuestionario "CaracterísticasDocumento10 páginasAdaptación para Futbolistas (CPRD-F) Del Cuestionario "CaracterísticasJuan Francisco JácomeAún no hay calificaciones
- Psicologa Aplicada Al Fútbol Jugar Con CabezaDocumento371 páginasPsicologa Aplicada Al Fútbol Jugar Con CabezaJohann Acarapi100% (1)
- Libro, Lo Que Todo Entrenador Deportivo Debe SaberDocumento122 páginasLibro, Lo Que Todo Entrenador Deportivo Debe SaberyordanysAún no hay calificaciones
- Historia Psicología Del Deporte México PDFDocumento18 páginasHistoria Psicología Del Deporte México PDFSusana FigueroaAún no hay calificaciones
- Psicologia Del Deporte PDFDocumento0 páginasPsicologia Del Deporte PDFLuis Muñoz Torralvo100% (1)
- TEORIA Y PRACTICA ENTRENAMIENTO LeerDocumento59 páginasTEORIA Y PRACTICA ENTRENAMIENTO LeerAnuar antonio Florencia CanoAún no hay calificaciones
- Proceso Psicologico en El DeporteDocumento9 páginasProceso Psicologico en El DeportejuanjoromiAún no hay calificaciones
- Psicologia Deportiva EvaluacionDocumento10 páginasPsicologia Deportiva EvaluacionJuanito Coba Feria100% (1)
- Módulo: El Arbitraje DeportivoDocumento40 páginasMódulo: El Arbitraje DeportivoMarisela Palomares BelloAún no hay calificaciones
- Apuntes de Aprendizaje Motor. by ZapaDocumento135 páginasApuntes de Aprendizaje Motor. by Zapabigtor18100% (1)
- Aplicaciones Practicas Desde La Preparacion FisicaDocumento206 páginasAplicaciones Practicas Desde La Preparacion FisicaHuang Chung YuAún no hay calificaciones
- Factores Psicologicos Que Influyen en El DeporteDocumento191 páginasFactores Psicologicos Que Influyen en El DeporteMariángeles Cano100% (2)
- Técnicas de intervención psicológica en deporteDocumento23 páginasTécnicas de intervención psicológica en deporteAgustín Sánchez EspínAún no hay calificaciones
- Futbol N6Documento124 páginasFutbol N6crokas2100% (2)
- NeurocognicionDocumento11 páginasNeurocognicionEl Último MohicanoAún no hay calificaciones
- Intervencion Psicologica en El Deporte de Alto Rendimiento PDFDocumento32 páginasIntervencion Psicologica en El Deporte de Alto Rendimiento PDFPepe CaleroAún no hay calificaciones
- Revista AB Futbol Liderazgo y Habilidades en Coaching Deportivo PDFDocumento142 páginasRevista AB Futbol Liderazgo y Habilidades en Coaching Deportivo PDFluis100% (4)
- Psicologia Deportiva - Unidad 1Documento30 páginasPsicologia Deportiva - Unidad 1leovera79Aún no hay calificaciones
- Aprendizaje Motor y Control MotorDocumento11 páginasAprendizaje Motor y Control Motordoptorluis100% (1)
- MONOGRAFIADocumento13 páginasMONOGRAFIAcarlos100% (1)
- 11 Resumen - CONTROL DE SISTEMAS PDFDocumento5 páginas11 Resumen - CONTROL DE SISTEMAS PDFKrisnel GrmAún no hay calificaciones
- Guía de Estudio - Mecanismos Generales de Regulacion y Control de La Postura y El Movimiento. Aguero R-2Documento6 páginasGuía de Estudio - Mecanismos Generales de Regulacion y Control de La Postura y El Movimiento. Aguero R-2Ana SerraAún no hay calificaciones
- Reflejos y Control MotorDocumento9 páginasReflejos y Control Motorcolocha01Aún no hay calificaciones
- Clase 3 Tecn Ctrol.Documento6 páginasClase 3 Tecn Ctrol.Jose Maria RodriguezAún no hay calificaciones
- Teorias Control Motor, Apuntes en Neurorehabilitación Milton Morgado VásquezDocumento7 páginasTeorias Control Motor, Apuntes en Neurorehabilitación Milton Morgado VásquezMilton Morgado Vásquez100% (1)
- Capitulo 7 Subsistema de ControlDocumento18 páginasCapitulo 7 Subsistema de ControlLennys Mina AnguloAún no hay calificaciones
- Bases neurofisiológicas del control motorDocumento10 páginasBases neurofisiológicas del control motorSusana Avilés GarcíaAún no hay calificaciones
- Psicologiapdf 342 Bases Neurofisiologicas y Principios Generales Del Control MotorDocumento8 páginasPsicologiapdf 342 Bases Neurofisiologicas y Principios Generales Del Control MotorThelma RpAún no hay calificaciones
- Trabajo de BiociberneticaDocumento40 páginasTrabajo de Biociberneticainvestigacion fabaAún no hay calificaciones
- Bases Neurofisiológicas y Principios Generales Del Control MotorDocumento13 páginasBases Neurofisiológicas y Principios Generales Del Control MotorAneth SalgadoAún no hay calificaciones
- Principios Del Aprendizaje SensoriomotorDocumento5 páginasPrincipios Del Aprendizaje SensoriomotormonicaAún no hay calificaciones
- Bloc de Notas Sin TítuloDocumento14 páginasBloc de Notas Sin TítuloCarolina CerdaAún no hay calificaciones
- Cuestiones Fisiología MuscularDocumento7 páginasCuestiones Fisiología Muscularmaria del carmen ruiz fernandezAún no hay calificaciones
- El Sistema SensomotorDocumento8 páginasEl Sistema SensomotorDiego Ale Sanchez ObrequeAún no hay calificaciones
- Tema 56 - S2efDocumento13 páginasTema 56 - S2efVíctor Sánchez AguilarAún no hay calificaciones
- Lab Percepción FimeDocumento4 páginasLab Percepción FimebrandonbalandranoAún no hay calificaciones
- Aprendizaje MotorDocumento4 páginasAprendizaje MotorIvan Alejandro LópezAún no hay calificaciones
- ControlMotorLumbarDocumento91 páginasControlMotorLumbarJorge SilvaAún no hay calificaciones
- Teorias Del Control MotorDocumento7 páginasTeorias Del Control MotorDiego Noroña GarcíaAún no hay calificaciones
- Resumen Prueba 2 PensamientoDocumento7 páginasResumen Prueba 2 Pensamientoesteban.133.didoAún no hay calificaciones
- Bases Cinestesicas Del MovimientoDocumento7 páginasBases Cinestesicas Del Movimientoroxxanna2642Aún no hay calificaciones
- Anatomia Aplicada 11º Sistema Nervioso Generalidades Parte 2Documento19 páginasAnatomia Aplicada 11º Sistema Nervioso Generalidades Parte 2DANIEL ALEJANDROAún no hay calificaciones
- Fisiologia Bioquimica JMCiordiaDocumento24 páginasFisiologia Bioquimica JMCiordiaDANIEL ALEJANDROAún no hay calificaciones
- Anatomia Aplicada 12º Sistema Nervioso Cerebro Vias 1Documento59 páginasAnatomia Aplicada 12º Sistema Nervioso Cerebro Vias 1DANIEL ALEJANDRO100% (1)
- Anatomia Aplicada 11º Sistema Nervioso Generalidades Parte 1Documento25 páginasAnatomia Aplicada 11º Sistema Nervioso Generalidades Parte 1DANIEL ALEJANDRO100% (2)
- Esquema Corporal BiomDocumento26 páginasEsquema Corporal BiomDANIEL ALEJANDROAún no hay calificaciones
- METABOLISMODocumento10 páginasMETABOLISMODANIEL ALEJANDROAún no hay calificaciones
- Power Anato 1Documento18 páginasPower Anato 1DANIEL ALEJANDROAún no hay calificaciones
- Anatomia Aplicada 11º Sistema Nervioso Generalidades Parte 2Documento19 páginasAnatomia Aplicada 11º Sistema Nervioso Generalidades Parte 2DANIEL ALEJANDROAún no hay calificaciones
- Power Biomecanica N°3 LumbociaticasDocumento19 páginasPower Biomecanica N°3 LumbociaticasDANIEL ALEJANDROAún no hay calificaciones
- METABOLISMO PowerDocumento22 páginasMETABOLISMO PowerDANIEL ALEJANDROAún no hay calificaciones
- MuscularDocumento21 páginasMuscularDANIEL ALEJANDRO100% (1)
- EscoliosisDocumento19 páginasEscoliosisDANIEL ALEJANDRO100% (1)
- Objetivos Formas Detrabajo en Spining para Gente de 40-50 AñosDocumento18 páginasObjetivos Formas Detrabajo en Spining para Gente de 40-50 AñosDANIEL ALEJANDROAún no hay calificaciones
- Muñeca y ManoDocumento22 páginasMuñeca y ManoDANIEL ALEJANDROAún no hay calificaciones
- Lesiones Oseas y Meniscales de La Rodillla 2da ParteDocumento15 páginasLesiones Oseas y Meniscales de La Rodillla 2da ParteDANIEL ALEJANDROAún no hay calificaciones
- Lesiones Deportivas de HombroDocumento20 páginasLesiones Deportivas de HombroDANIEL ALEJANDRO100% (3)
- Ejercicios Hipotiroidismo PDFDocumento14 páginasEjercicios Hipotiroidismo PDFDANIEL ALEJANDRO75% (4)
- Índice SanitatiaDocumento5 páginasÍndice SanitatiaDANIEL ALEJANDROAún no hay calificaciones
- Dolor PosturalDocumento10 páginasDolor PosturalDANIEL ALEJANDROAún no hay calificaciones
- Educación Física en Niños Con TdahDocumento17 páginasEducación Física en Niños Con TdahDANIEL ALEJANDROAún no hay calificaciones
- Enfermedad de ParkisonDocumento20 páginasEnfermedad de ParkisonDANIEL ALEJANDROAún no hay calificaciones
- Enfermedades CardiovascularesDocumento19 páginasEnfermedades CardiovascularesDANIEL ALEJANDROAún no hay calificaciones
- Ejercicios Hipotiroidismo PDFDocumento14 páginasEjercicios Hipotiroidismo PDFDANIEL ALEJANDRO75% (4)
- Dolor PosturalDocumento17 páginasDolor PosturalDANIEL ALEJANDROAún no hay calificaciones
- TP Uai 2Documento28 páginasTP Uai 2DANIEL ALEJANDROAún no hay calificaciones
- Valoración de La FuerzaDocumento14 páginasValoración de La FuerzaDANIEL ALEJANDROAún no hay calificaciones
- Sanitaria TPDocumento64 páginasSanitaria TPDANIEL ALEJANDROAún no hay calificaciones
- Presentacion 3Documento18 páginasPresentacion 3DANIEL ALEJANDROAún no hay calificaciones
- Presentación 1Documento15 páginasPresentación 1DANIEL ALEJANDROAún no hay calificaciones
- Presentacion 2Documento14 páginasPresentacion 2DANIEL ALEJANDROAún no hay calificaciones